
不管你是停电还是什么状态,控制器都能记忆当前位置的,PLC 做控制时,可以把编码器写入掉保持里面就行,CNC系统也是一样,把每个运行当前值都记入掉电保持数据寄存器里面,就不怕掉电了。只要不是人为手动摇动拖板都可以的。
08-12-16 13:51


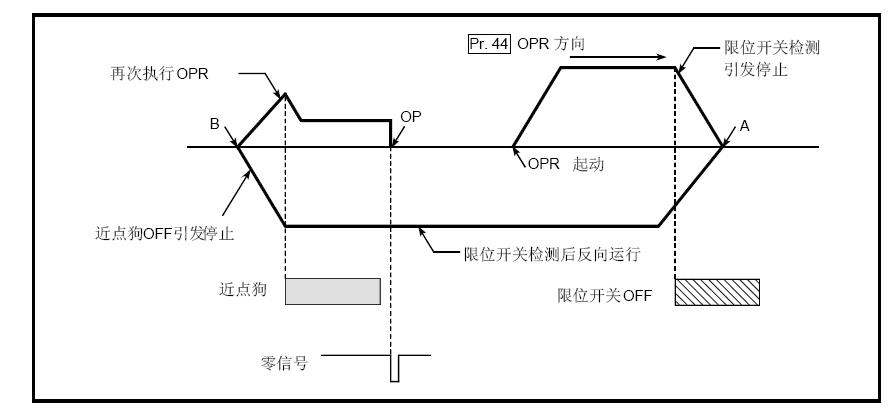
你用的是什么PLC,在三菱的Q系列PLC里,QD75定位模块专门有个DOG搜索功能,就是用来解决这个问题的,一会我把图传上来,参考一下,可以在程序中自己模仿编进去的
08-12-16 16:50


这问题撞到枪口上来了
正如楼上说的,三菱Q的QD75模块有原点回归重试功能
今天一天在外面帮客户试了个QD75模块,也做了这个重试功能
客户没用过这个,从点动正反转、原点回归、单独定位、插补等一个一个试了给他看
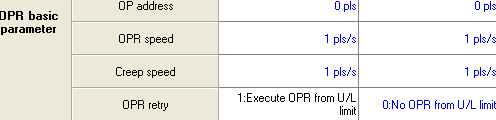
这个功能只要在软件中选择下就可以了
图中的黑色部分
![附件]()
正如楼上说的,三菱Q的QD75模块有原点回归重试功能
今天一天在外面帮客户试了个QD75模块,也做了这个重试功能
客户没用过这个,从点动正反转、原点回归、单独定位、插补等一个一个试了给他看
这个功能只要在软件中选择下就可以了
图中的黑色部分
最后修改:2008-12-16 21:11:40
08-12-16 21:11

这个问题不管是PLC还是数控系统,都是很难解决的,即使解决也是不能准确定位的,楼上说的在限位C点往左的方向设个D点。到了D点强行向左运行,虽然这样不会超限,但是接下来的问题就是你回原点的位置就是不准确了。因为机器不是人,具有判断能力知道我工作台在哪个方向应该朝哪个方向远转,我们只有给他更多的电信号,才能让他更准确的做动作,想做的完美,就要多加信号开关,但是这样成本上升,程序复杂,不如在说明上注明,禁止操作人员把工作台移到超过原点右侧位置后回原点。
08-12-17 23:37

本人用的是OMRON的PLC,昨天我也看了一下手册,也有像三菱ORP一样的功能,但是我想到的是另外一个问题,就是ORP功能说的是接触到右边的限位信号后向相反方向返回再执行回原点,问题就出在安全性上,因为我知道伺服的限位不能单纯的在PLC来控制,还要把限位信号直接接到伺服驱动器中,这样才安全,如果这样的话,那限位这个功能好像就意义不大了!有点危险哦!说的不对请见谅!
08-12-18 08:45

返回原点是指定了方向的,在一个方向上找不到原点信号那就只能到超限位了,我也遇到这样的问题,我的解决办法是:手动点动电机到合理位置后再操作自动回原点,这样只要在机器上做个标记给操作工就可以了,在说明书上说明一下,楼上说的方法是可以的,加信号点再加PLC的控制程序左右运动找原点是可以的。
09-01-07 08:57