
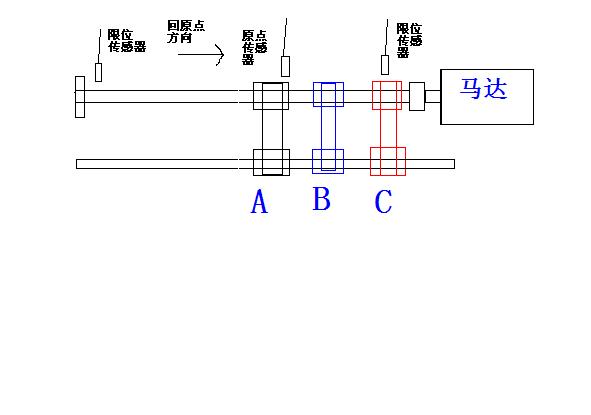
各位好!小弟近期遇上这样一个问题!如图所示!当马达回原点时,从左到右进行原点搜索,这样回原点到A点没有问题,但是如果我回到原点后,突然断电了,又有人为的往右移动了机械手!如图B位置,若此时系统上电,并按复位,机械还是按回原点的方向向右回原点,此时就回到了C的位置,系统并报警说超程!请问有什么办法可以解决这个问题吗?thanks!![附件]()
08-12-16 08:47


人为的问题一般来说应从制度上解决。
不知道你用的是什么系统,如果是PLC+伺服的话可以在C点往左的方向设个D点。到了D点强行向左运行,可以确保不会超限。
不知道你用的是什么系统,如果是PLC+伺服的话可以在C点往左的方向设个D点。到了D点强行向左运行,可以确保不会超限。
08-12-16 10:47

这种情况,我认为是设计有问题,如果是要这样计算原点的话,有几种方式:
1.当按下回原点命令,拖板向B运动或者向C运动。当碰到B或者是C的时候向左运行,到A点原点。但是拖板回到A点时可以停止,但是这个位置也不是原点。因为有一个传感器的位置误差。所以还是要手动再向左走一段,然后回原点。如果是用传感方式,不管怎么走这都是找不到原点的。
2.用绝对位置编码器控制。只要你不把原点清零,就算是停电也能找到原点。但是有一点就是不能在停电后人为动拖板。
1.当按下回原点命令,拖板向B运动或者向C运动。当碰到B或者是C的时候向左运行,到A点原点。但是拖板回到A点时可以停止,但是这个位置也不是原点。因为有一个传感器的位置误差。所以还是要手动再向左走一段,然后回原点。如果是用传感方式,不管怎么走这都是找不到原点的。
2.用绝对位置编码器控制。只要你不把原点清零,就算是停电也能找到原点。但是有一点就是不能在停电后人为动拖板。
08-12-16 12:38