
这两套伺服通过PLC走同步,
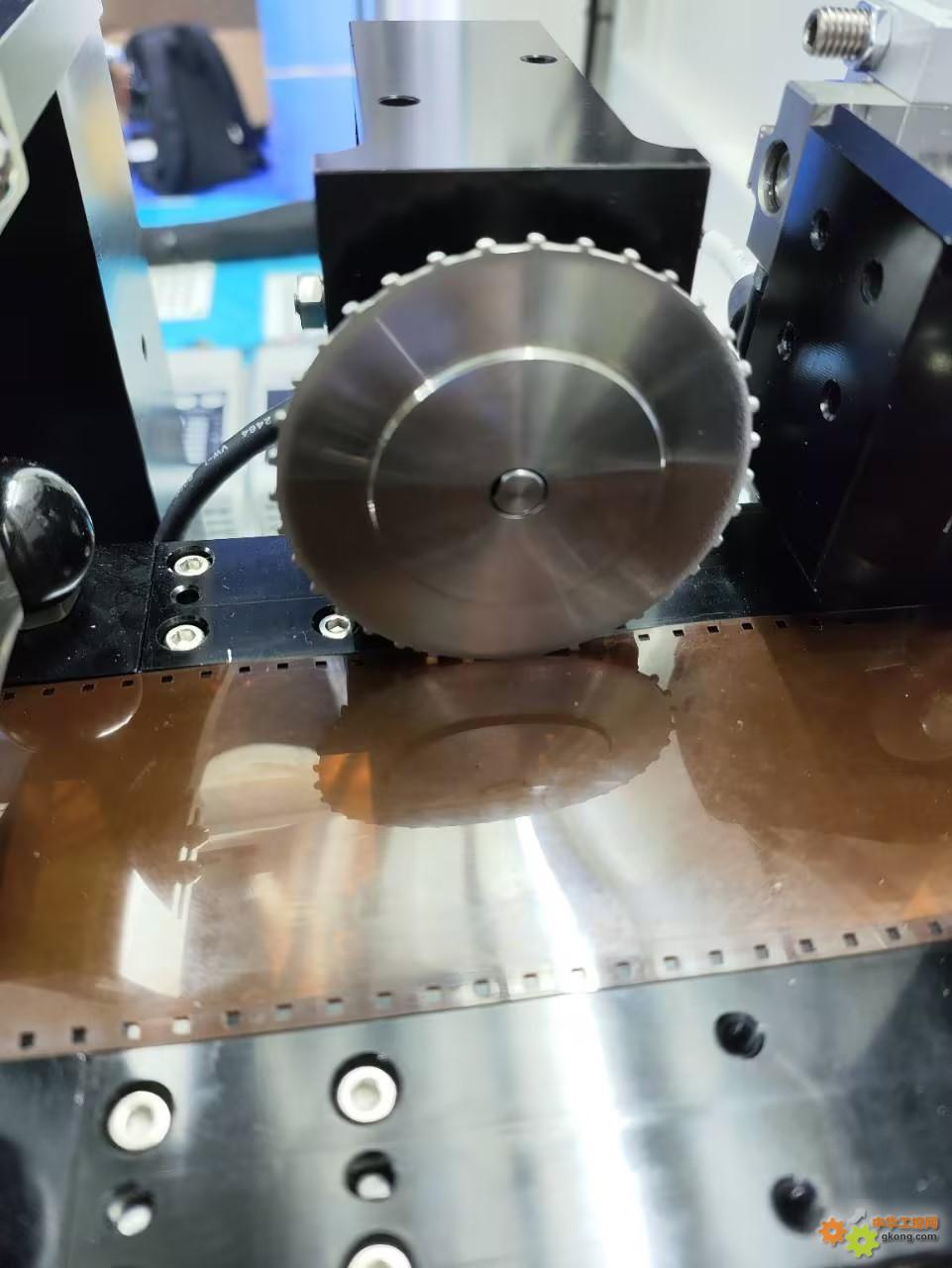
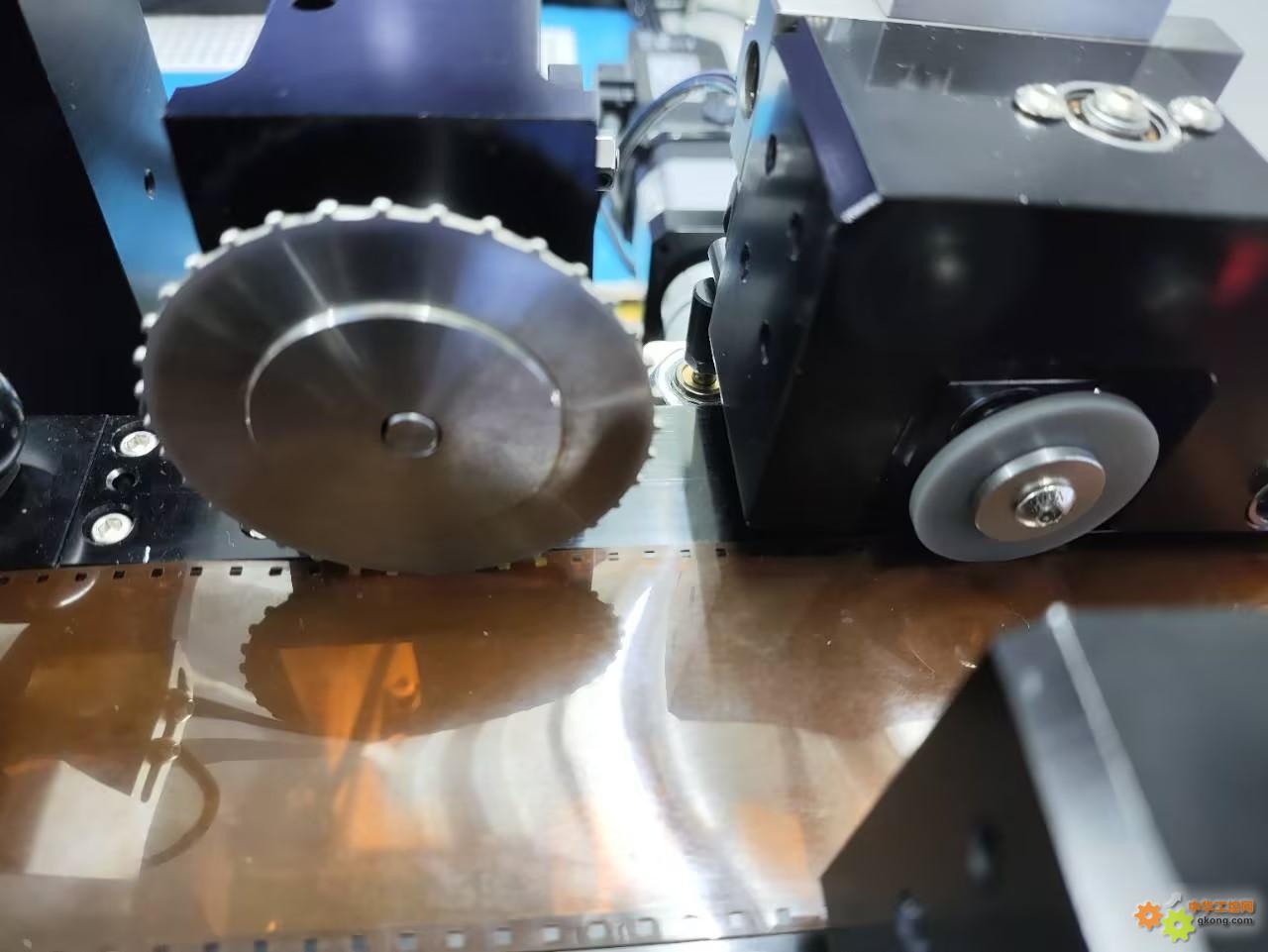
有1个外部编码器,上面带了不锈钢的金属轮子,金属轮子上面均匀分布36个齿(料带上面每个芯片是7个孔),金属轮子转动,1个齿会卡住1个孔,
伺服电机的轮子带动料带,料带带动金属轮子,
设备做工艺时有相机拍照,可以算出偏差值发给PLC,但相机视野只有正负1.25mm,
1个料带的长度在100米左右,
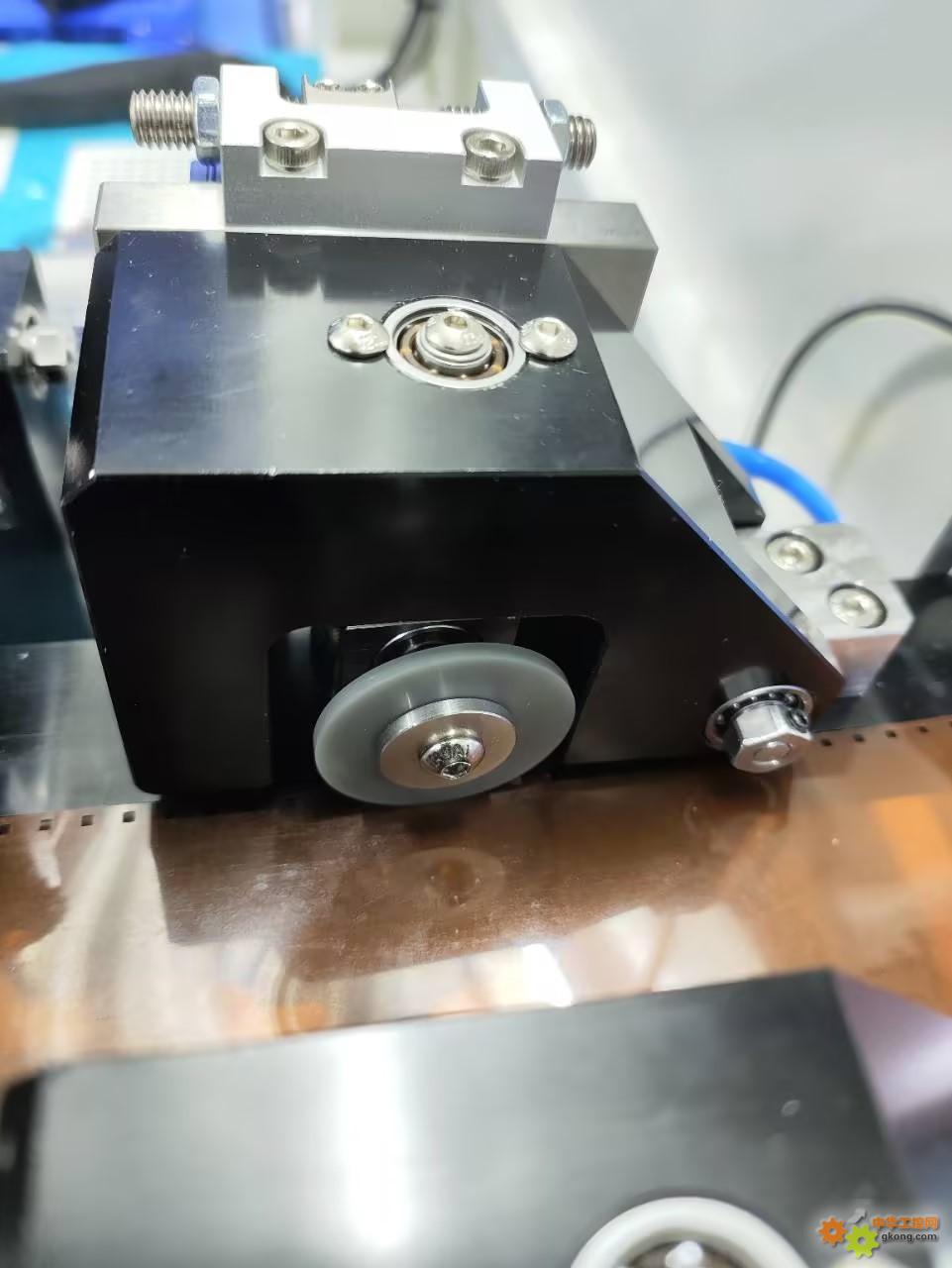
伺服电机的轮子有弹性,安装跟料带近一点,相当于半径变小一点;安装跟料带远一点,相当于半径变大一点,
伺服电机朝一个方向转,如果用轮子的周长来计算电子齿轮比,轮子周长的计算会有偏差,轮子和料带安装的距离导致半径会有偏差,轮子靠摩擦带动料带因打滑有偏差(打滑的量无规律,有时候多,有时候少,基本上每次都会有一点打滑),
以上图片是空料带,不敢拍带有芯片的地方,
图片中有编码器带的不锈钢的金属轮子,伺服电机的轮子(绿色的),料带另一端还有一个伺服带着绿色轮子(没拍照,和这个是一样的),
以上情况正在考虑外部编码器反馈给伺服驱动器,通过驱动器自动补偿,目前还未实现,
上来问问高手,有没有更好的方法大大减少误差???
最后修改:2025/4/3 10:17:17




