登录
首页
PLC论坛
PLC论坛
回帖
发帖
正文
主题:QD75MH4怎么样做运动控制
点击:1510 回复:4
楼主
编辑
引用
管理
465010287
现有一个伺服驱动器及电机 MR-J3-40B,支持光纤。QD75MH4 ,但是不知道怎么做简单运动控制,现论坛基本上都是QD77MS16 4轴等等模块案例。跟MS MH有啥区别,程序能不能兼容,望大神指点1 2
20-09-08 17:00
1楼
编辑
引用
管理
chi1225
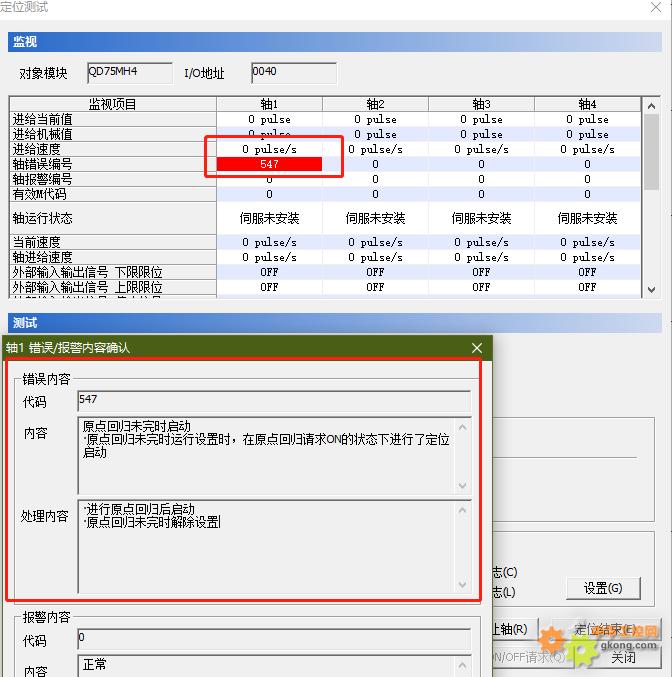
这种总线式我一般都是用数据设定式回原点方式,靠伺服电池记忆原点信息。只有原点回归完成后,报警解作了才可以做其他定位动作。
20-09-09 09:22
2楼
编辑
引用
管理
fumz78
QD75MH有的功能,QD77MS都有,用法一样,可以通过表格预先设定好,通过Y点启动定位。
20-09-09 12:01
3楼
编辑
引用
管理
465010287
表格预设数值,让他走多少就可以了。把缓存寄存器往里填数。。。就可以了吗
20-09-09 18:17
4楼
编辑
引用
管理
fumz78
表格直接设置数据,这些表格也有对应的缓冲器,也可以往缓冲区写入数据。
20-09-09 19:09
工控新闻
前5个月融资额232亿元 超去年全年!京东美团等大厂“疯投”机器人
西克2025新品 - 位移传感器 OD200
伊戈尔定增注册获同意 拟于深交所上市
丹佛斯传动携源网荷储一体化方案亮相光储直柔大会,助推绿色高质量发展
莱迪思与三菱电机合作带来新一代工业自动化体验
“万物皆可协作”,《2025年中国协作机器人产业发展蓝皮书》正式发布
三菱电机与鹿明机器人,达成战略合作!
非计划停机、试错烧钱?一本白皮书给出破解答案
更多新闻资讯