登录
首页
机器人论坛
回帖
发帖
正文
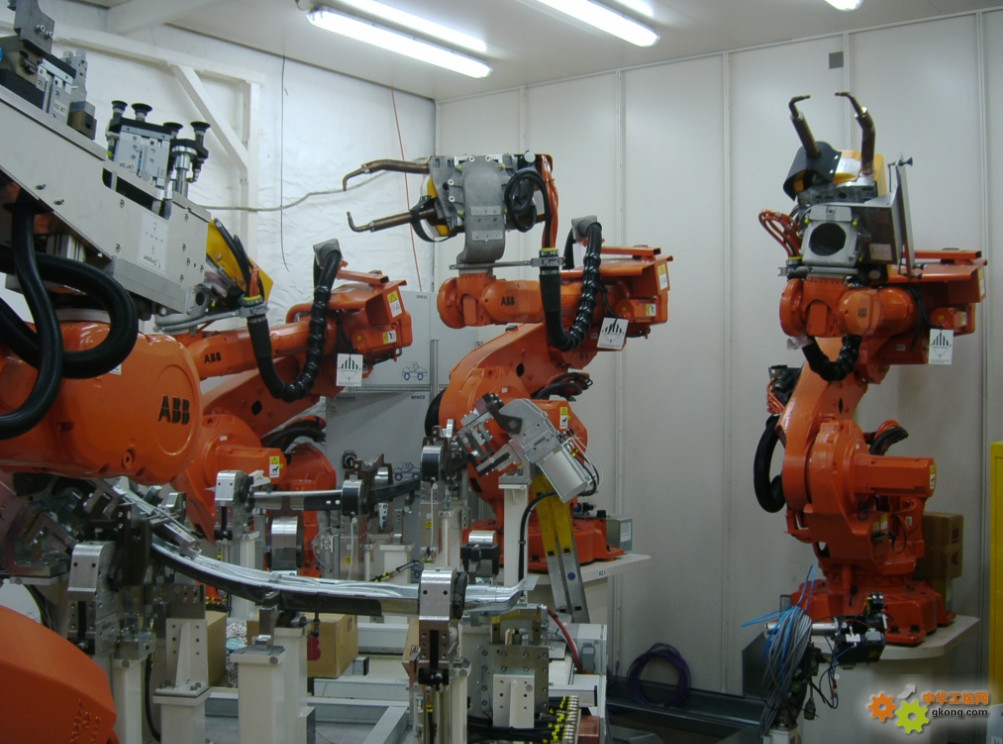
主题:几张项目的图片二
点击:2513 回复:42
楼主
编辑
引用
管理
菜根
点焊
焊接
太阳能
激光
合模机
17-02-16 09:37
1楼
编辑
引用
管理
cfg168
其实,关键的技术在于控制箱内部,可以开箱拍照吗?
17-02-16 09:41
2楼
编辑
引用
管理
菜根
无非就是PLC、继电器、安全继电器、远程模块、网关、电源这些东西啊。
17-02-16 09:49
3楼
编辑
引用
管理
mengx9806
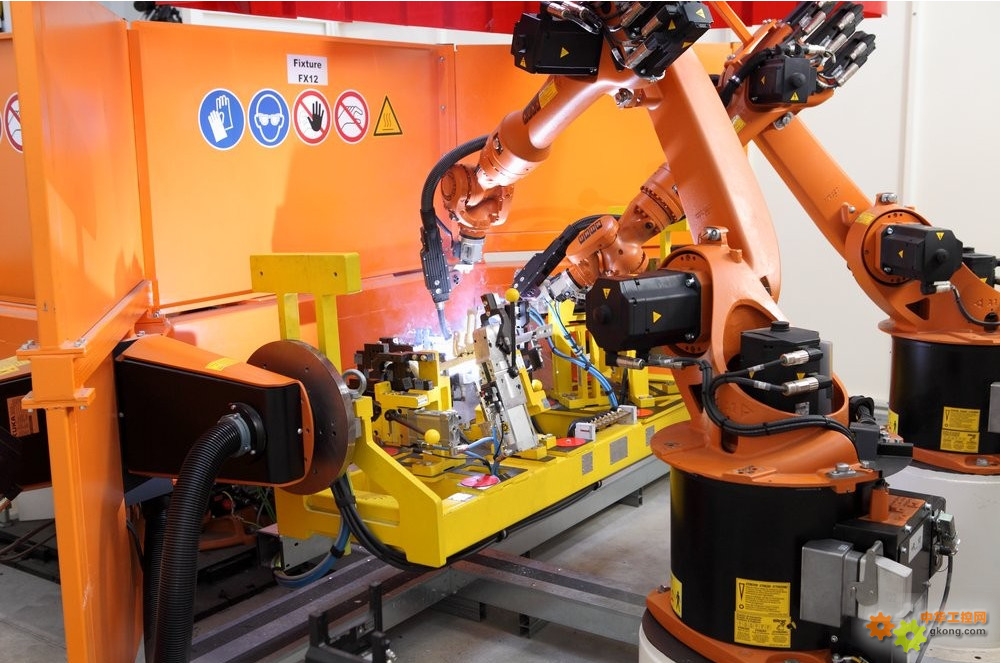
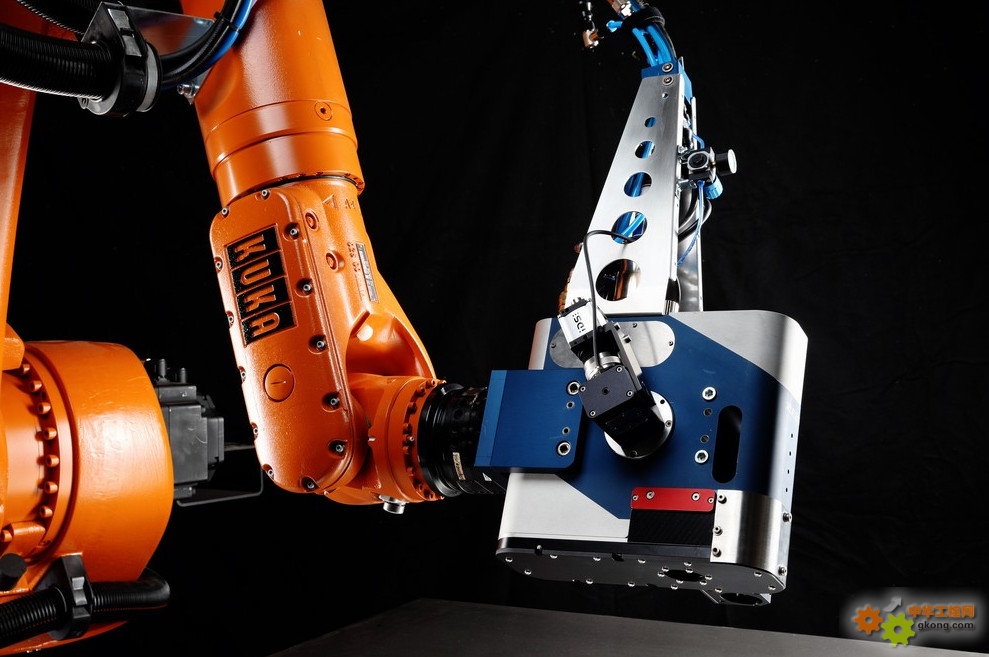
我想知道焊接这一部分是先扫描出焊缝的轨迹,然后再机械手跟着轨迹走,这个思路是对的吗?
17-02-16 09:51
4楼
编辑
引用
管理
cfg168
引用
菜根
在 2017/2/16 9:49:02 发言
【内容省略】
机械手的控制箱,是通过通讯线路和其他设备连接的吗。
17-02-16 09:51
5楼
编辑
引用
管理
zixisheng
为什么总感觉会撞一起
17-02-16 09:52
6楼
编辑
引用
管理
菜根
是的。现在我们一般使用PROFINET来通讯。
17-02-16 09:55
7楼
编辑
引用
管理
菜根
是对的,但不全是这样。
一种是先扫描一遍焊缝,然后再重现焊缝的位置进行焊接。
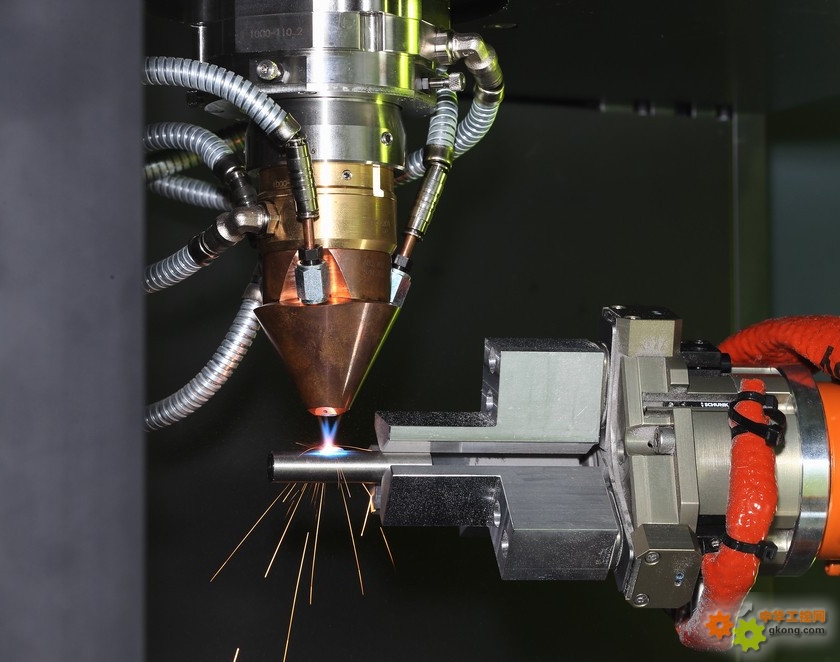
还有一种是将激光器安装在焊枪的前端,比如大约30mm的位置,一边焊接一边纠证焊缝位置。
17-02-16 09:57
8楼
编辑
引用
管理
菜根
机器人项目,如果存在相互交叉的工作区域,在调试过程中,有时真避免不了相互撞的事故,只能尽量减少这种事故,事前的路径规划、区域设置、逻辑设置、防呆处理就非常重要了。
17-02-16 09:59
9楼
编辑
引用
管理
mengx9806
一般来说,第二种用得较多吧。这种激光跟踪的,国内有没有做的比较好点的
17-02-16 10:01
上一页
下一页
工控新闻
链博会丨施耐德电气崔志达:技术创新赋能“中国制造”迈向“中国创造”
投资与技术双轮驱动 美团机器人生态版图初显
「壳」动新智,聚势而行:AVEVA与中海壳牌举办高层会谈,共谋行业发展新动能
AI驱动制造变革,链博会热议新质生产力核心路径
和利时助力上海电气洮南市风电耦合生物质绿色甲醇一体化示范项目顺利投产
工业阀门国家级重点专精特新“小巨人”企业 中德科技北交所IPO问询阶段
物料搬运自动化起重机劳易测传感器解决方案
零碳园区成为新风口,创维光伏引领从0到1创新实践
更多新闻资讯