登录
首页
机器人论坛
回帖
发帖
正文
主题:机器人夹具,夹紧方式
点击:2393 回复:5
楼主
编辑
引用
管理
zq3076
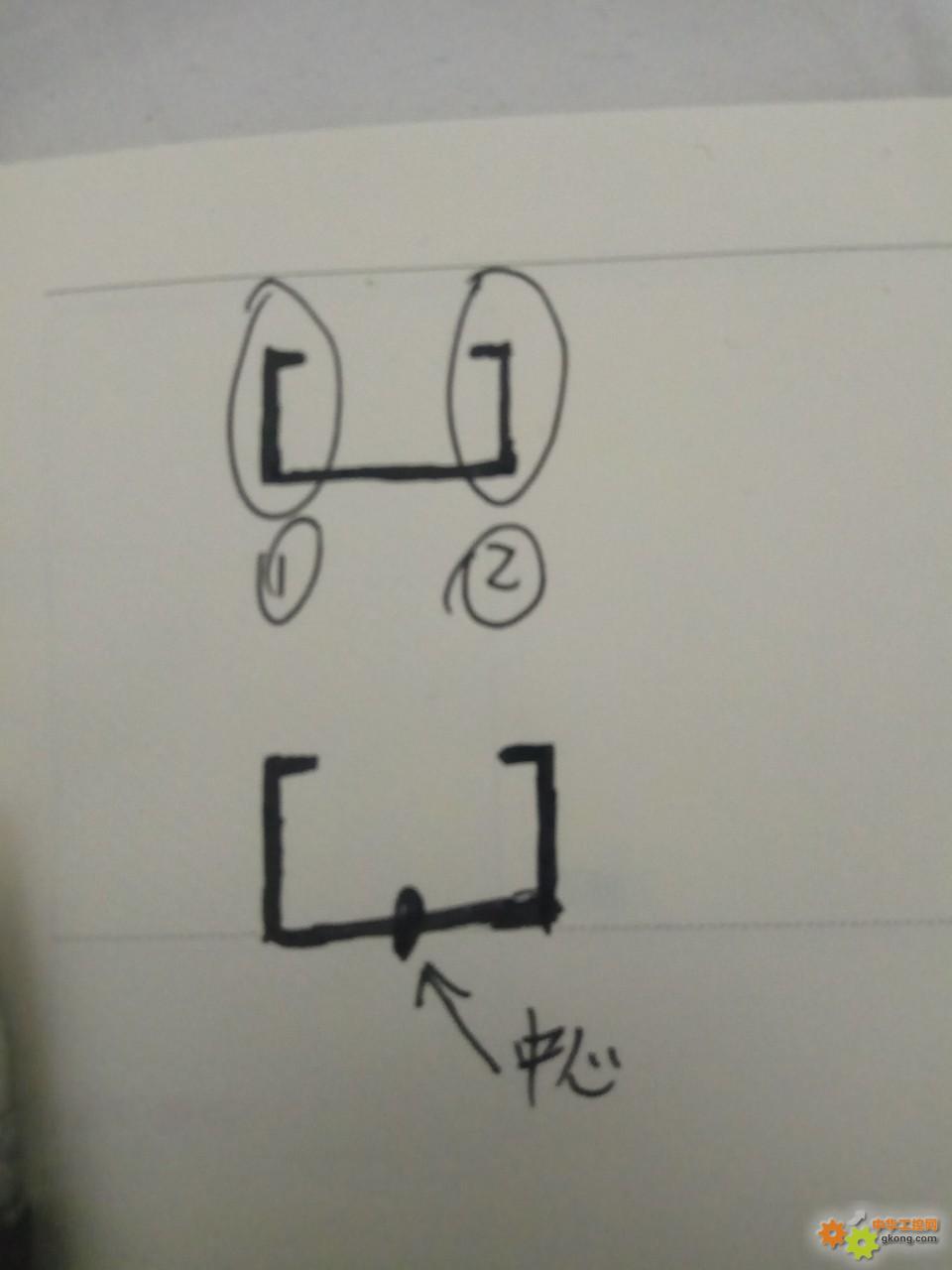
首先工件是不规则物体,夹具夹紧方式很多,这个问题是工人提出来的。
现场应用是图上方的夹具,①左边部分由机器人控制,右边②气缸控制,松开夹爪的时候先把气缸恢复原位,然后机器人移动左边部分。
有时候卡了,工人提出第二种方式。
也是用气缸,直接控制左右同时动作。画圈部分算是机器人的TCP点。
19-03-30 21:05
1楼
编辑
引用
管理
zq3076
求问。。。。。。
19-04-01 09:55
2楼
编辑
引用
管理
zq3076
求解求解求解求解
19-04-03 16:16
3楼
编辑
引用
管理
1530694073
我们就是第二种,不过我们工装夹规则物品
19-04-08 21:59
4楼
编辑
引用
管理
sxjice545
你这要解决什么问题?
如果是解决如何知道有否工件残留的话,价格传感器就好了
如果是需要解决残留问题,可以加电磁阀吹气或者气缸顶出
19-05-08 12:52
5楼
编辑
引用
管理
13451519172
工装夹具标准配件生产商--苏州希瑞格机器人,和大家共同探讨机器人夹具解决方案:
https://crgeoat.1688.com
https://13451519172.taobao.com
19-06-20 10:04
工控新闻
四部门开展人力资源服务业与制造业融合发展试点
双展联动 台达以数智化赋能行业转型升级
华南工博会直击丨具身集合齐登场,仙工智能展台全场景解锁
布诺科技携手汇川技术布局海外储能市场新格局
埃斯顿杯大学生机器人大赛部分院校完成校内选拔
强强联手!华沿机器人与基恩士共同赋能工业检测升级
重新定义性价比!兆易创新GD32C231系列MCU强势推出
宜科自动化与ADI达成战略合作聚焦IO-Link技术在工业通信领域的应用
更多新闻资讯