登录
首页
机器人论坛
回帖
发帖
正文
主题:几张项目的图片二
点击:2477 回复:42
楼主
编辑
引用
管理
菜根
点焊
焊接
太阳能
激光
合模机
17-02-16 09:37
1楼
编辑
引用
管理
cfg168
其实,关键的技术在于控制箱内部,可以开箱拍照吗?
17-02-16 09:41
2楼
编辑
引用
管理
菜根
无非就是PLC、继电器、安全继电器、远程模块、网关、电源这些东西啊。
17-02-16 09:49
3楼
编辑
引用
管理
mengx9806
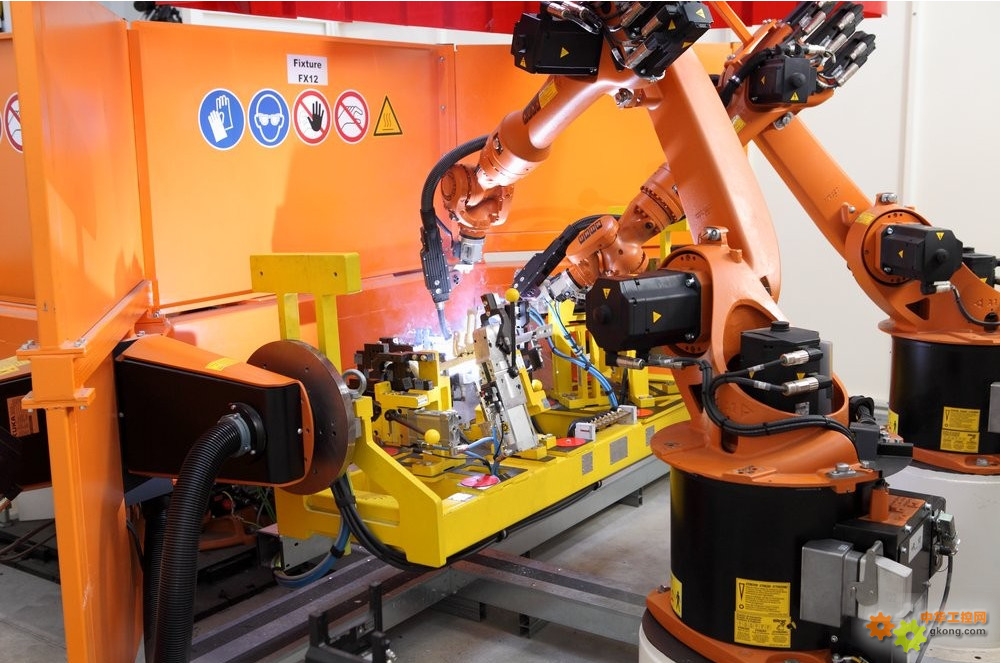
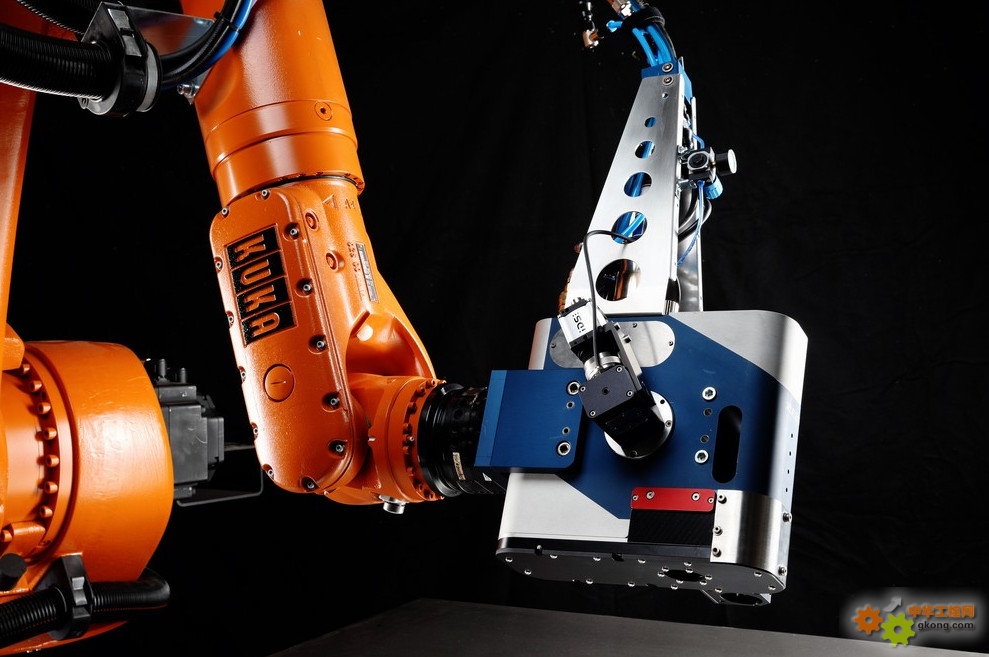
我想知道焊接这一部分是先扫描出焊缝的轨迹,然后再机械手跟着轨迹走,这个思路是对的吗?
17-02-16 09:51
4楼
编辑
引用
管理
cfg168
引用
菜根
在 2017/2/16 9:49:02 发言
【内容省略】
机械手的控制箱,是通过通讯线路和其他设备连接的吗。
17-02-16 09:51
5楼
编辑
引用
管理
zixisheng
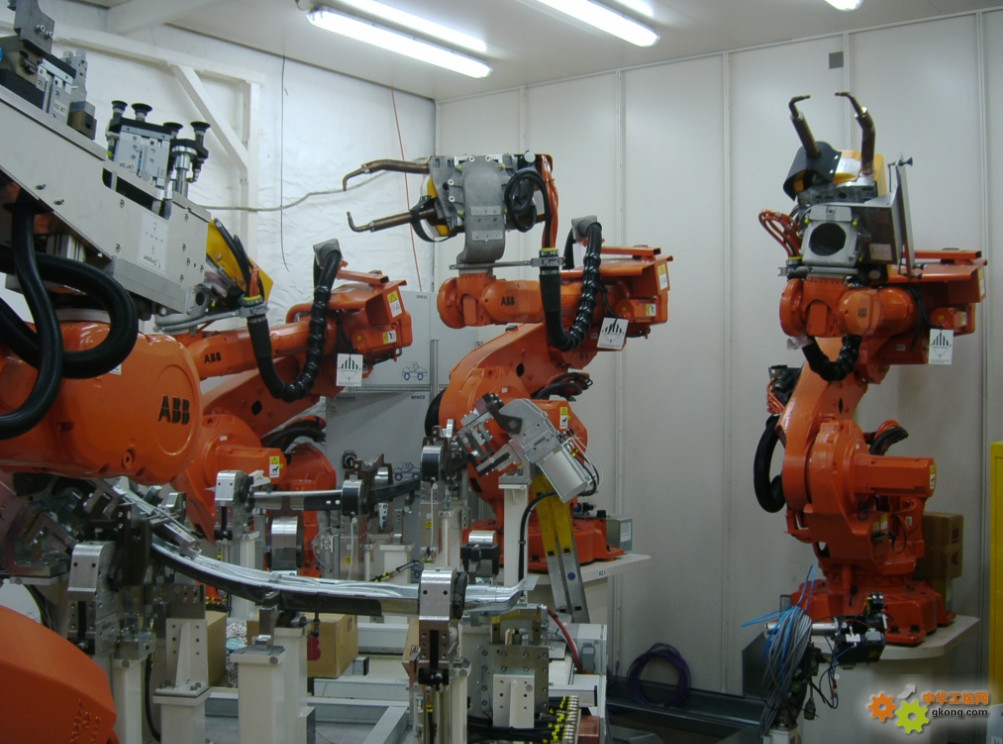
为什么总感觉会撞一起
17-02-16 09:52
6楼
编辑
引用
管理
菜根
是的。现在我们一般使用PROFINET来通讯。
17-02-16 09:55
7楼
编辑
引用
管理
菜根
是对的,但不全是这样。
一种是先扫描一遍焊缝,然后再重现焊缝的位置进行焊接。
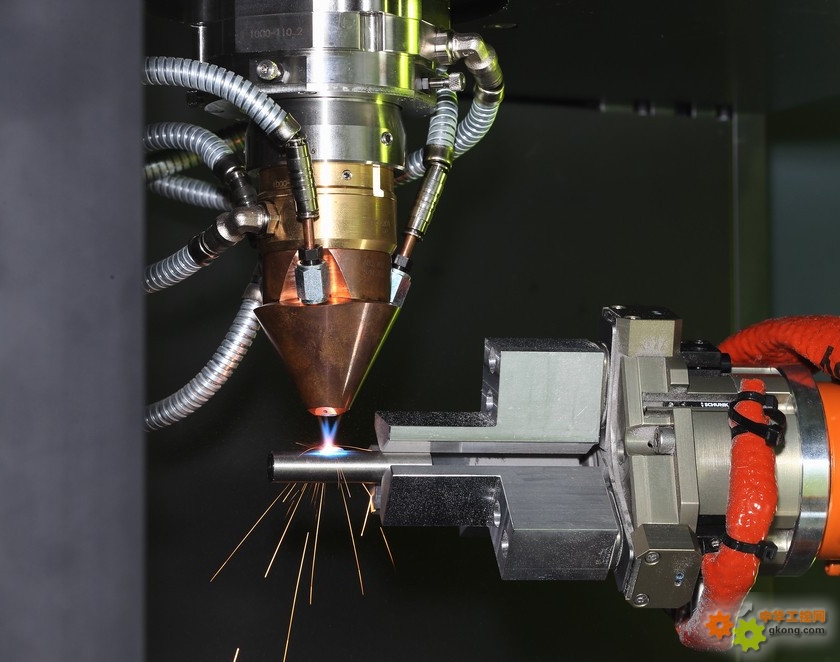
还有一种是将激光器安装在焊枪的前端,比如大约30mm的位置,一边焊接一边纠证焊缝位置。
17-02-16 09:57
8楼
编辑
引用
管理
菜根
机器人项目,如果存在相互交叉的工作区域,在调试过程中,有时真避免不了相互撞的事故,只能尽量减少这种事故,事前的路径规划、区域设置、逻辑设置、防呆处理就非常重要了。
17-02-16 09:59
9楼
编辑
引用
管理
mengx9806
一般来说,第二种用得较多吧。这种激光跟踪的,国内有没有做的比较好点的
17-02-16 10:01
上一页
下一页
工控新闻
工业互联网与船舶行业、石化化工行业融合应用参考指南发布
PLCopen与智能制造深圳研讨会圆满召开!
强强联手!华沿机器人与基恩士共同赋能工业检测升级
重新定义性价比!兆易创新GD32C231系列MCU强势推出
数智破局·生态共生:重构全球制造新引擎 2025 WOD制造业数字化博览会即将在沪盛大启幕
震撼!工业 3.0时代,被魏德米勒这波「技术狂飙」操作帅到了
双展联动 台达以数智化赋能行业转型升级
施耐德电气:凭借开放自动化与数字化技术,助力生态伙伴提升业务价值
更多新闻资讯