登录
首页
机器人论坛
回帖
发帖
正文
主题:KUKA的KR60-3 机器人报错,提示安全设备通讯错误
点击:1860 回复:2
楼主
编辑
引用
管理
925885755
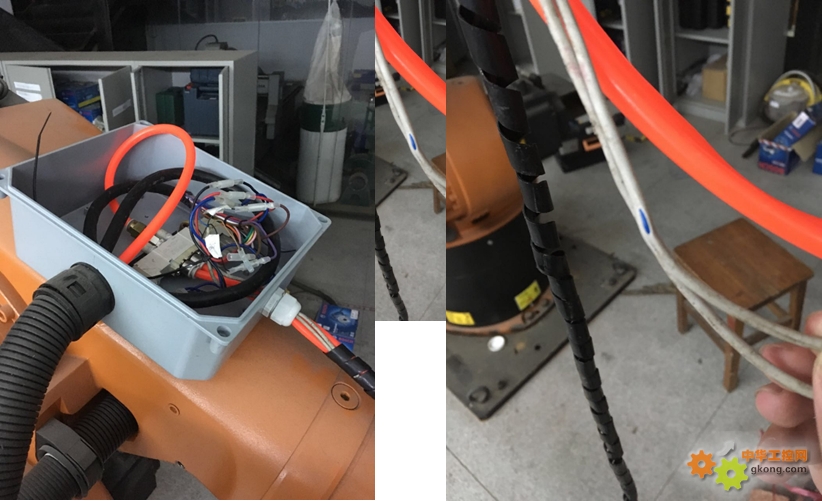
操作情况:使用6D鼠标操作向X正方向移动。机器人第四轴负方向旋转,机器人第六轴抓手的气缸电缆不断拉紧,直至机器人紧急停止,如图报错。剪开限制电缆的绳子之后,发现灰色绝缘线有一个地方破损,捆绑着电缆的角钢变型。
尝试过:
1. 把示矫器接口拔插一次。
2. EtherCat的网线拔插一次。
3. 位于四轴EtherCat的线拔插。
但是始终显示图二错误。
16-09-07 09:29
1楼
编辑
引用
管理
496836226
通信故障,专家模式,显示里面复位一下,就好了!
16-09-19 06:57
2楼
管理
放荡不羁的小黑侠-LH
该帖内容不符合相关规定!
17-12-01 16:59
工控新闻
东土科技部分募集资金投资项目变更 工业操作系统项目拟引入国资战投
四部门开展人力资源服务业与制造业融合发展试点
施耐德电气:凭借开放自动化与数字化技术,助力生态伙伴提升业务价值
手机厂商纷纷布局机器人业务
罗克韦尔自动化推出 PharmaSuite 12.00,加速实现安全、可扩展的部署
强强联手!华沿机器人与基恩士共同赋能工业检测升级
全球制造业PMI连续3个月低于50% 全球经济低位徘徊
ABB与红帽(Red Hat)扩大在过程自动化系统领域的合作,以推动工业创新
更多新闻资讯