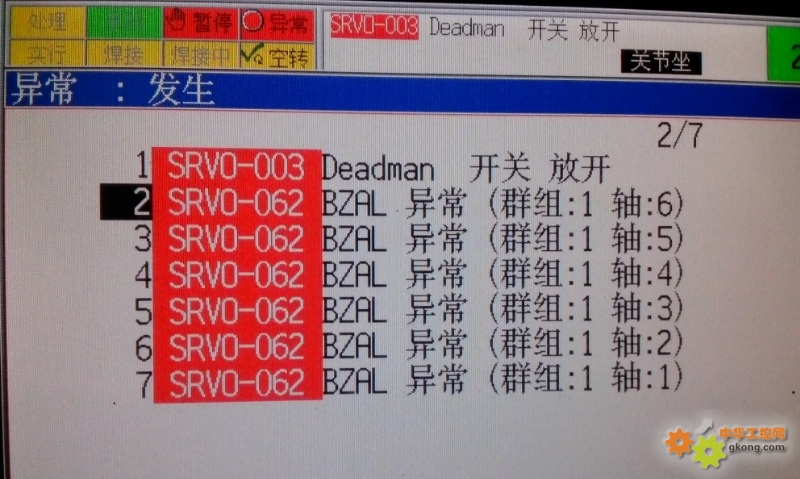
大哥,昨天我把第一台机器人安装好了,电气控制柜里面PLC由于没编程暂时没有给机器人的crm端口信号,也没有在手臂上安装机器手抓。可是机器人通电过后用示教器控制不能动,于是我就把机器人的Ui特殊输入信号和机器人手臂的末端机器人手抓检查断裂信号设置为无效,排除了两个故障,可以是在异常履历里面还剩一个“
SRVO—062 BZAL 异常(群组:1 轴:1至6)”异常故障。现在只有这个异常的存在,机器人从现场装好到现在仍然没有动过,我在仿真软件里面还没遇到过这个问题。
我现在就想暂时不给plc信号和安装机器人手抓的情况下,先练习运用一下之前学习的理论知识,看看和仿真软件里面的差别有多大。
最后修改:2014/12/14 9:56:44