
这几天没事,闲着没事搞两下.]
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
PS:此帖子着重软件编程,不套路硬解接线等等.
软件:Control FPWIN Pro 7
硬解:FP0R-T32CT.
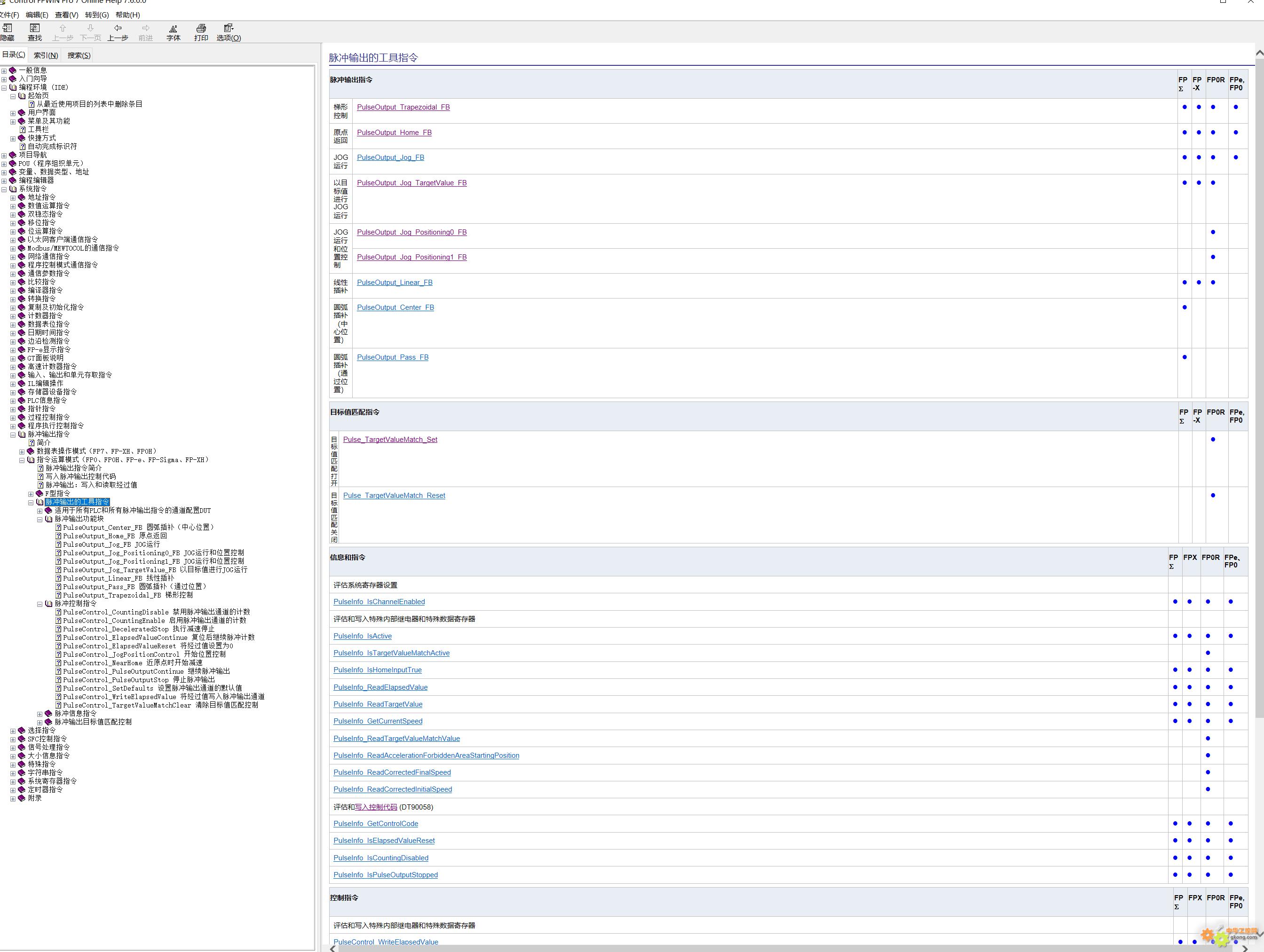
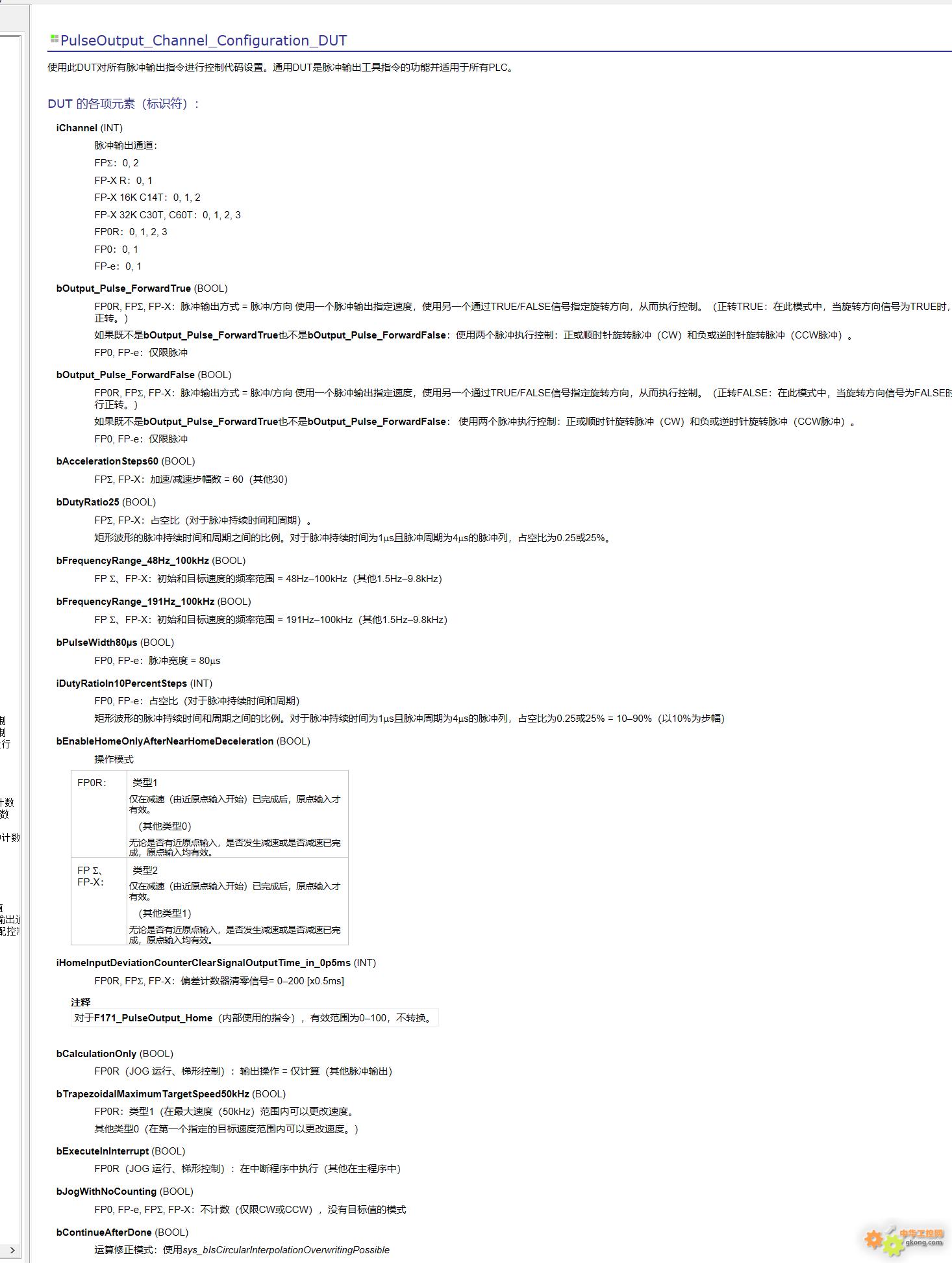
手册:官网下载的是用老编程软件对绝对地址编程,感觉比较乱,这里就不用了,直接用Control FPWIN Pro 7的帮助文件.
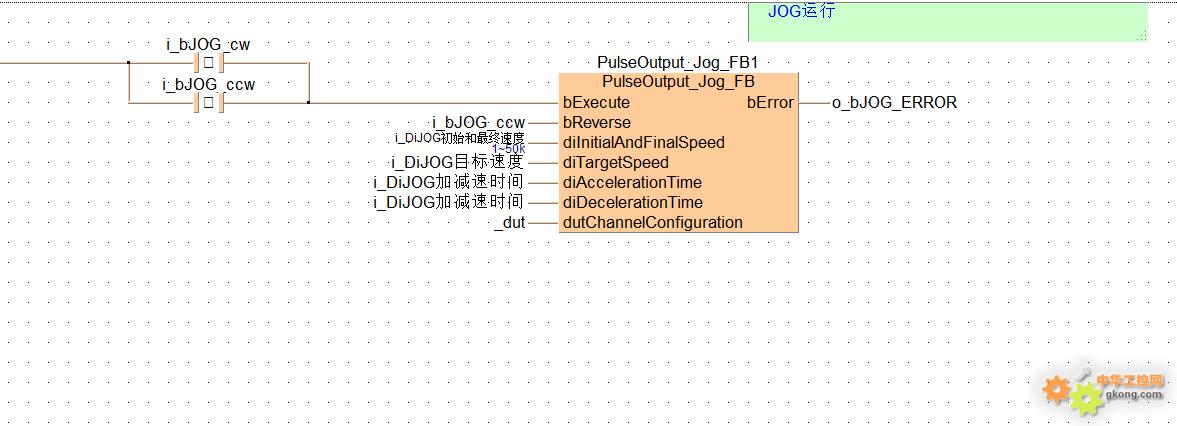
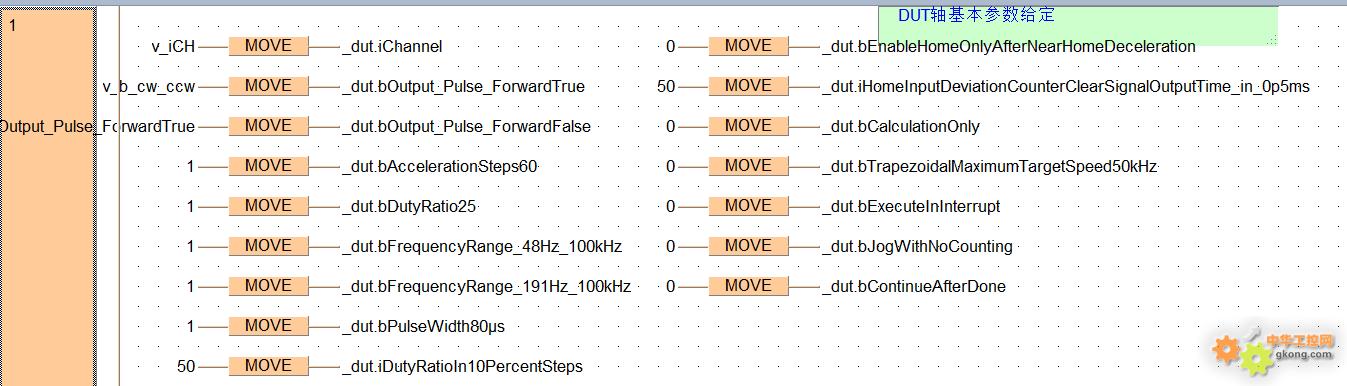
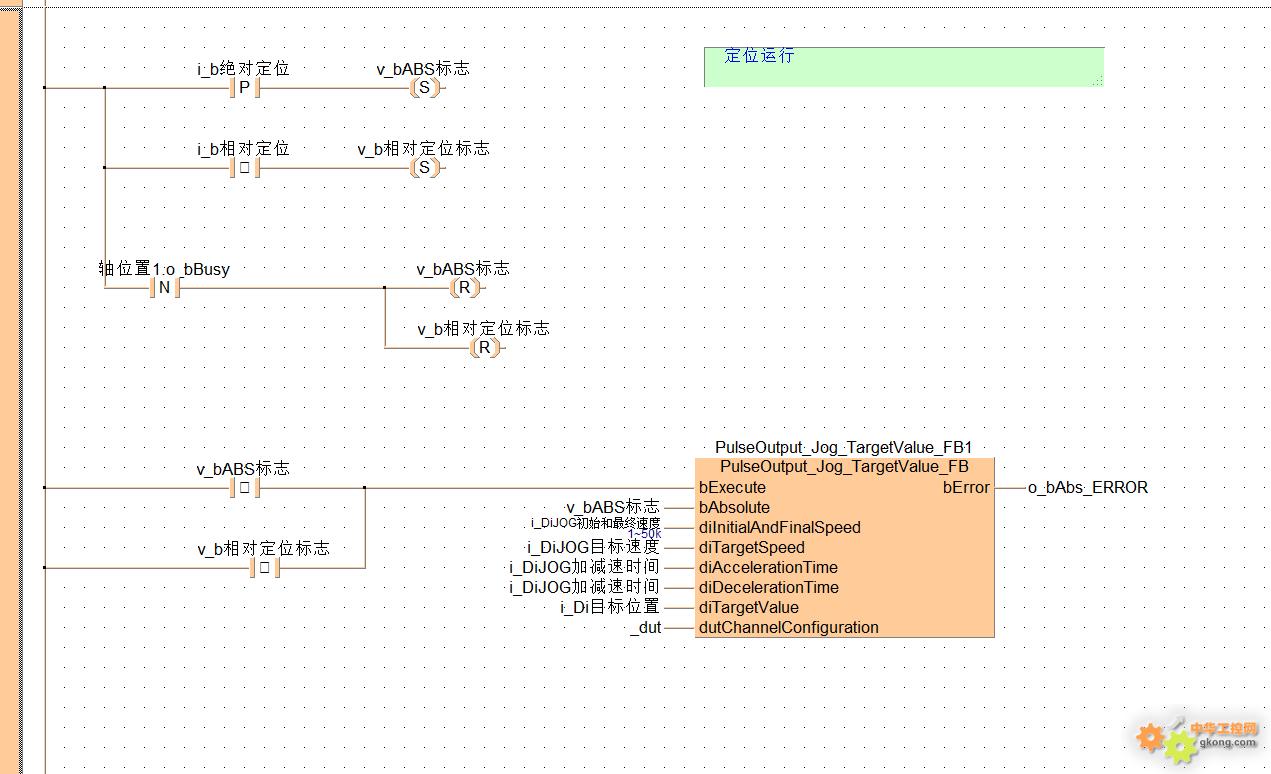
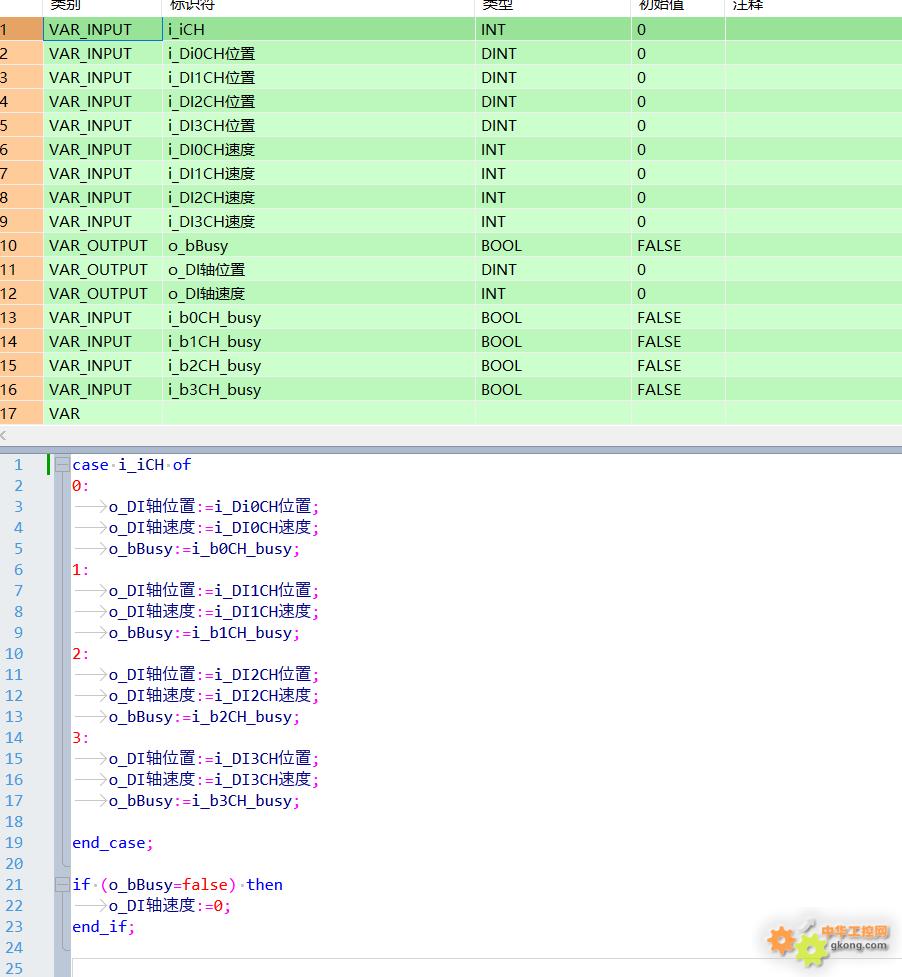
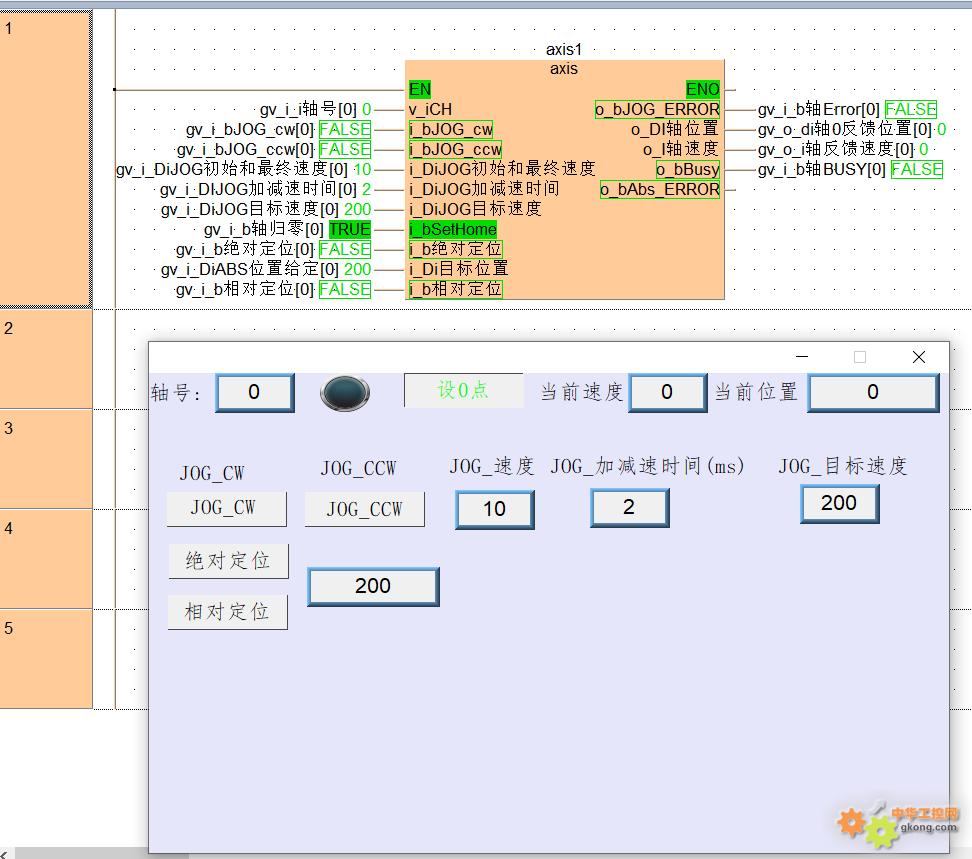
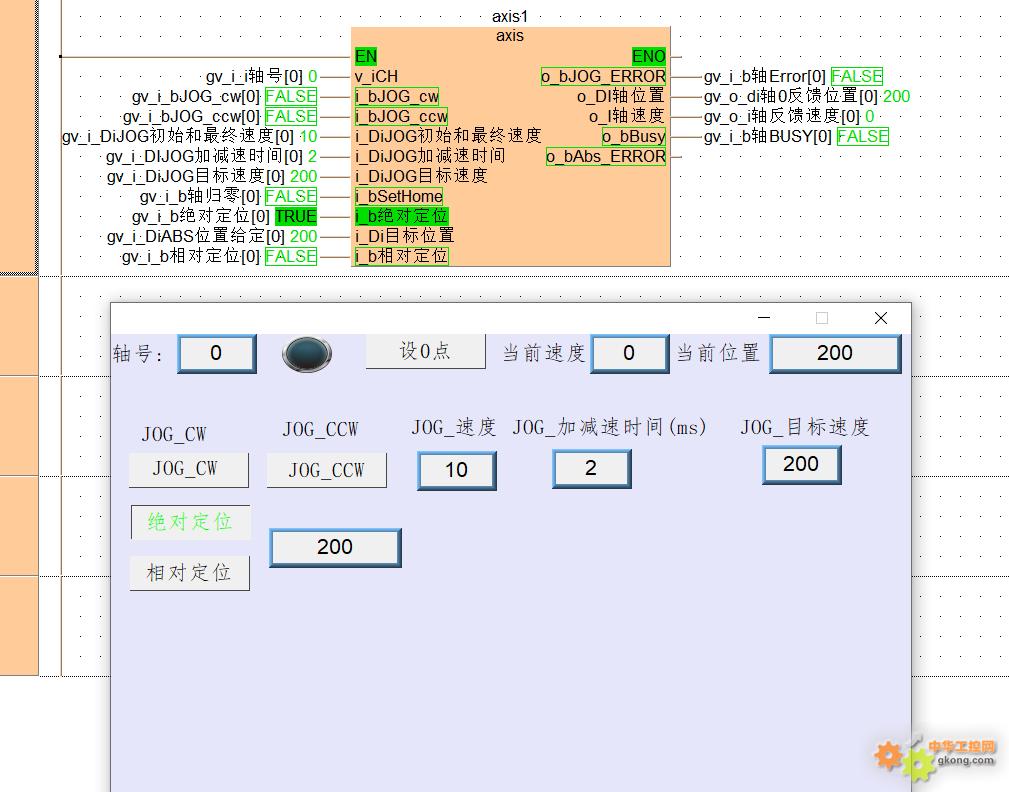
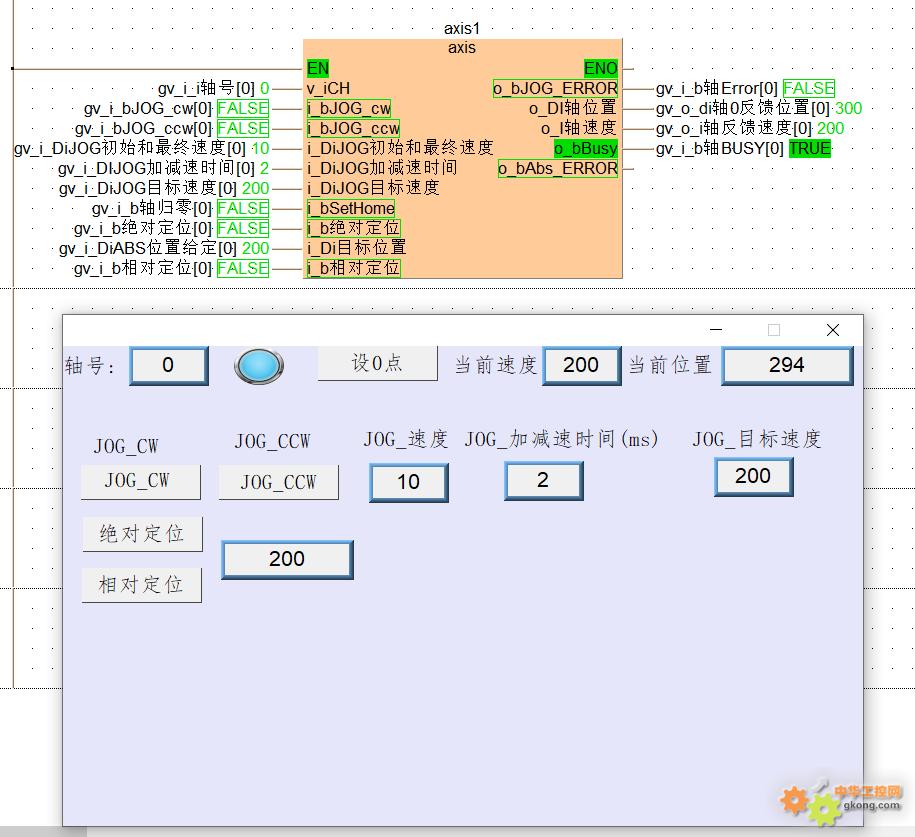
编程:
1.1简介:
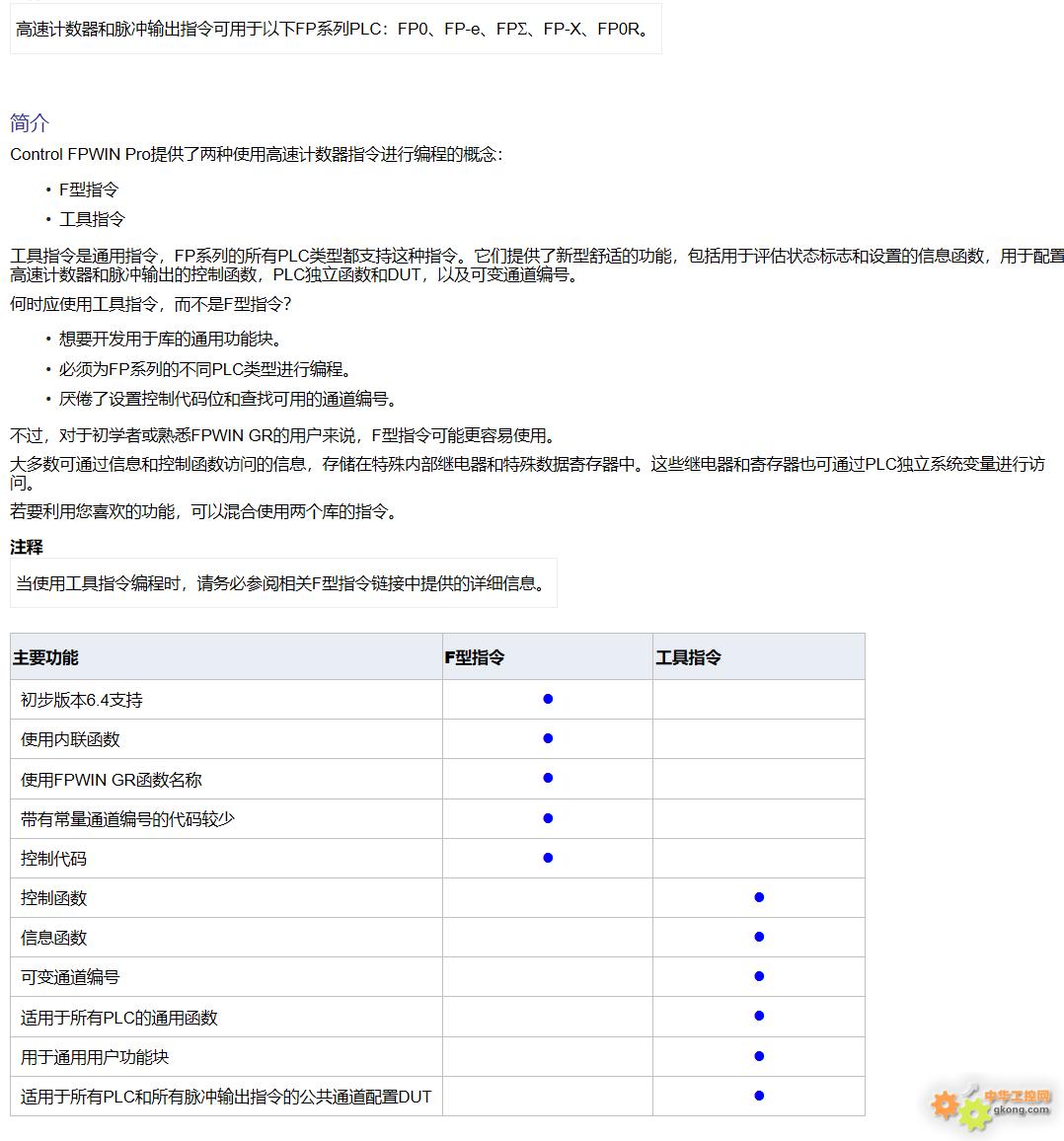
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
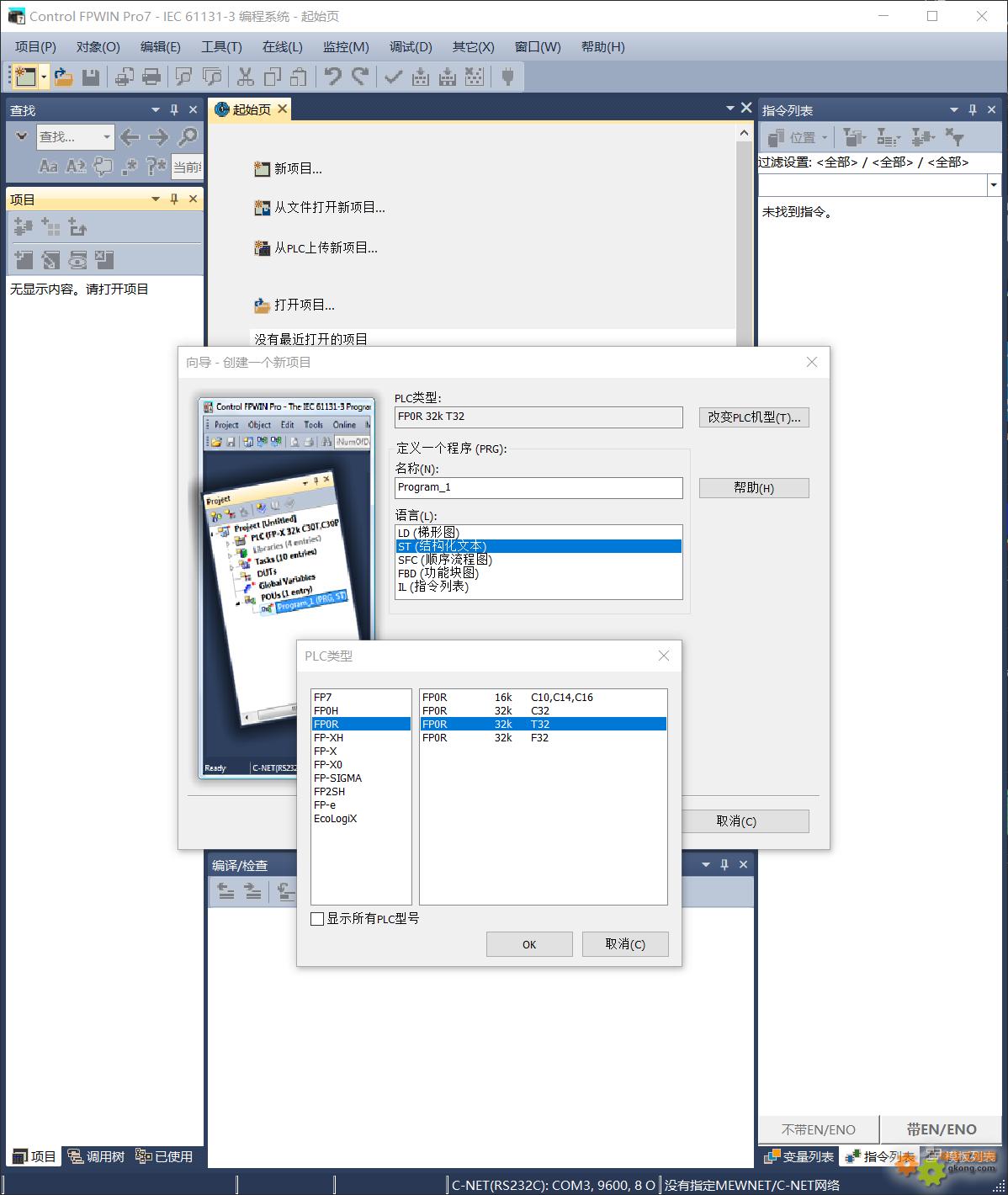
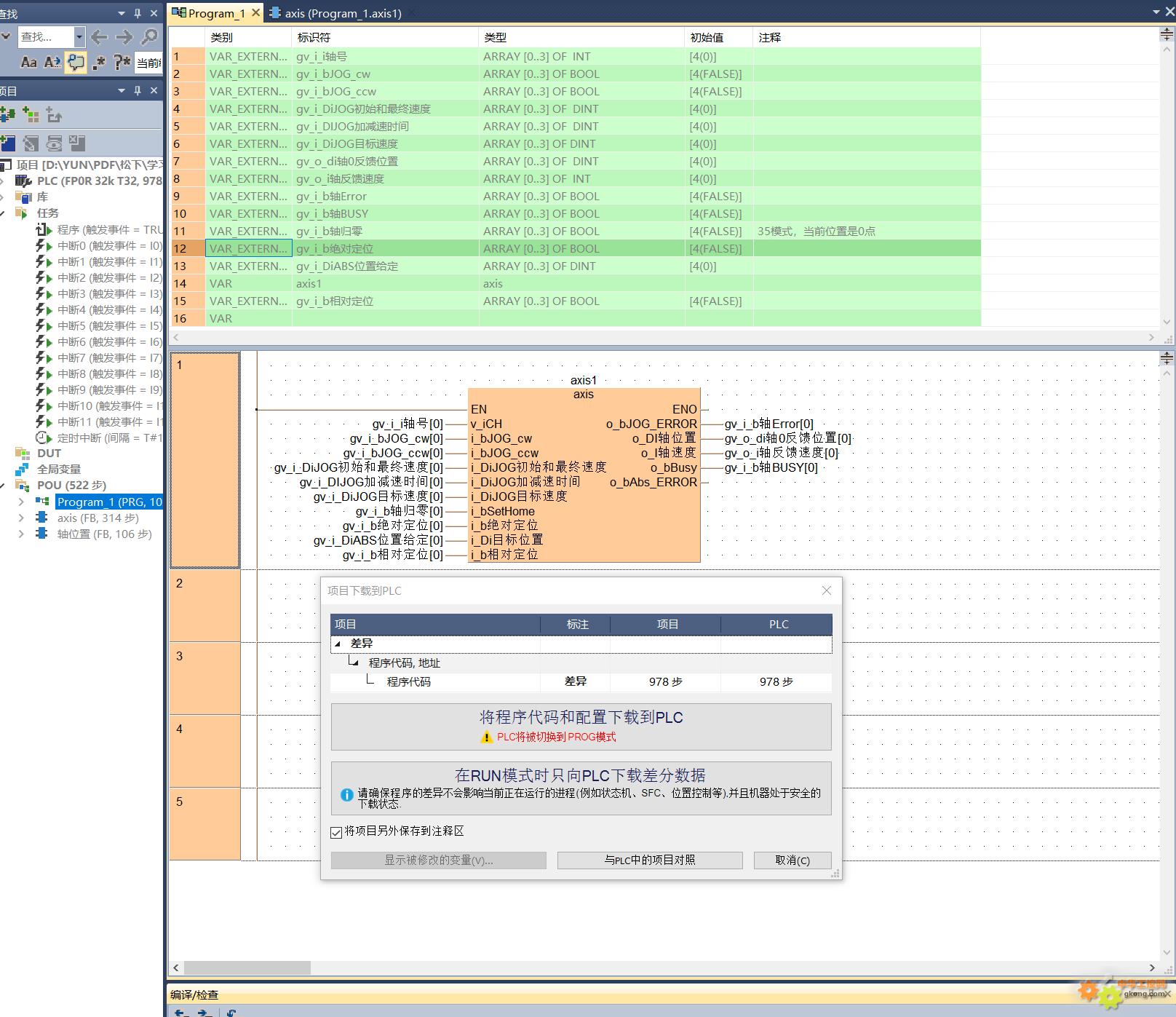
1.2.直接打开软件看把,
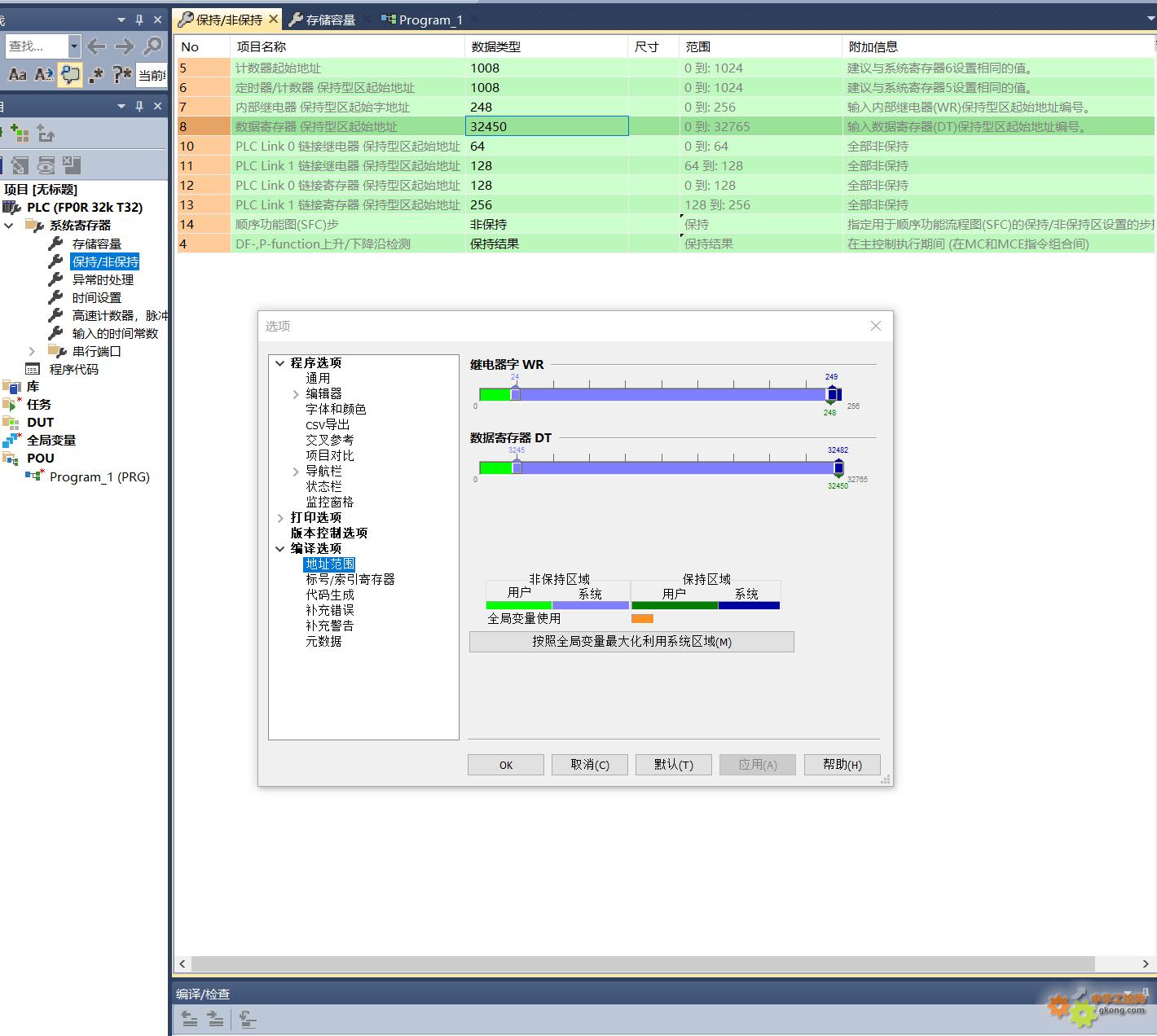
ps1:有个不爽的地方,用户区域,非保持和保持中间有间隔.系统使用的.
ps2:异常处理感觉松下很奇葩,动不动就会亮红灯。这里不讨论,着重玩脉冲。
~~~
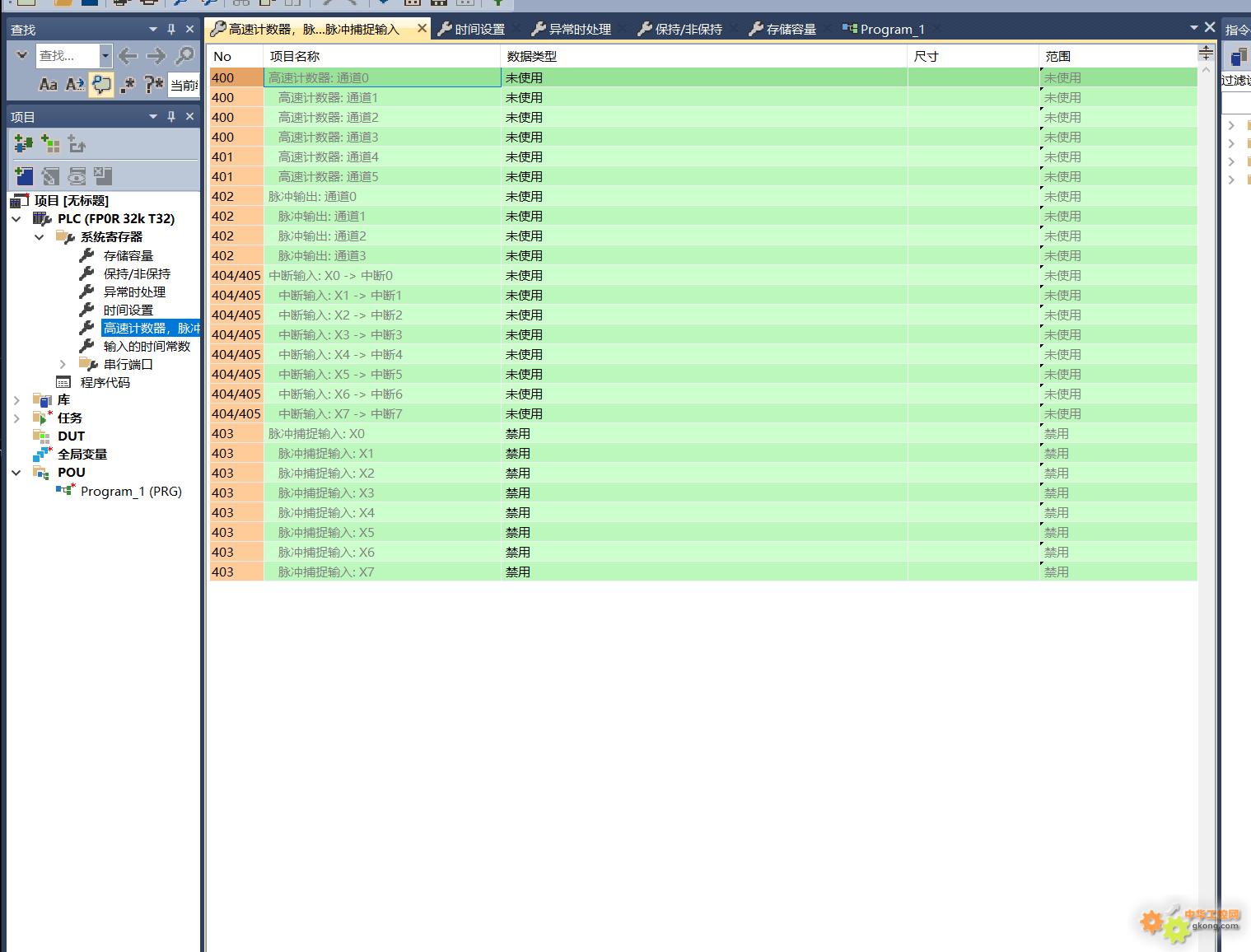
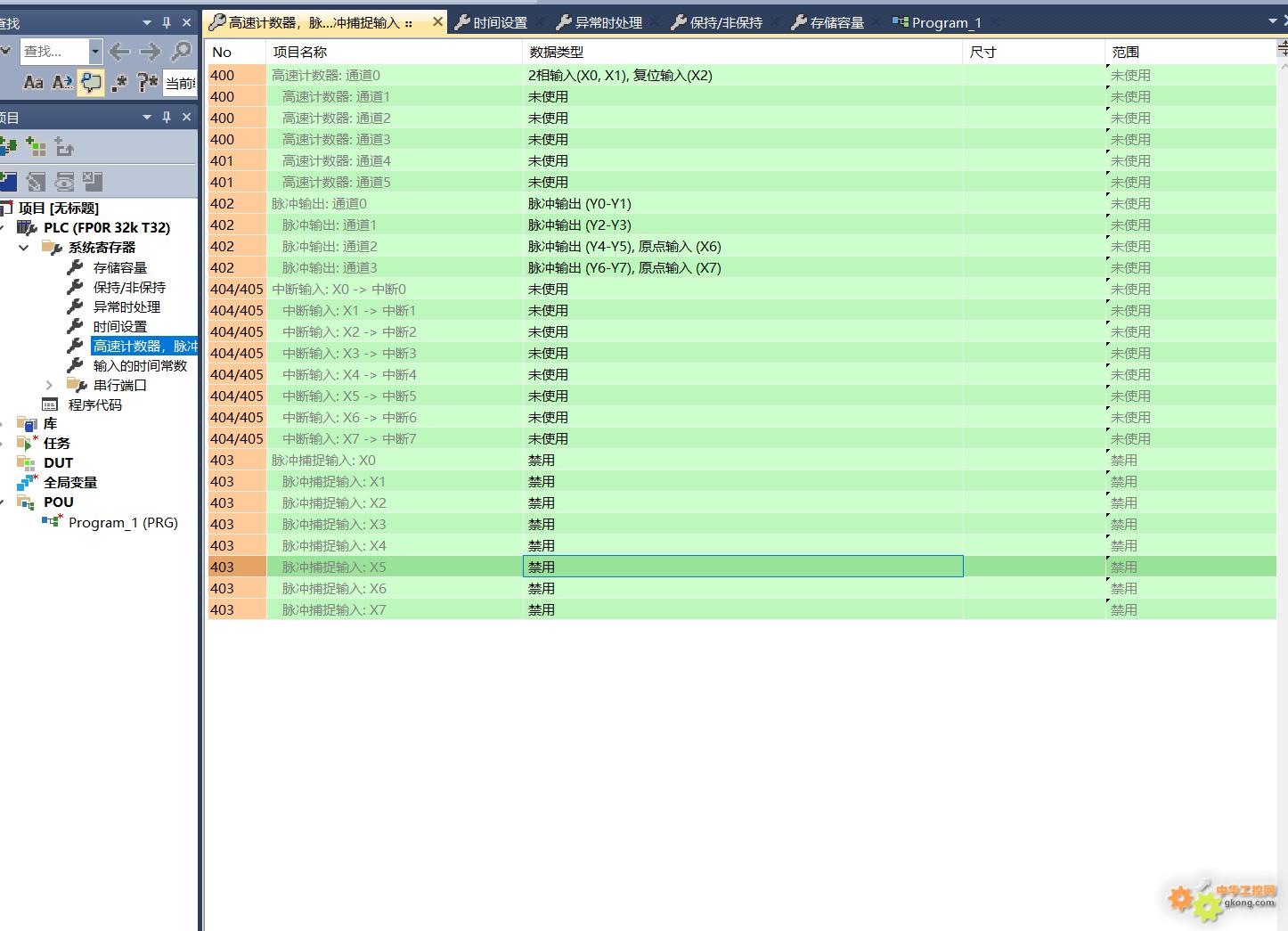
打开高速计数器和脉冲输出:
最后修改:2023/3/10 10:03:33




 ,传统PLC用FB慢
,传统PLC用FB慢
