
之前定点停车用的回零动作.但回零动作有明显的卡顿..
并且这个后续偏移动作是不可控的..没办法加减速参数进去
之前的设备向前传送时是双面固定.所以卡顿也不影响定位..
新设备为了提效.改成单面固定 .如果卡顿....物料会向前滑动..
所以就得想其他的代替方案..
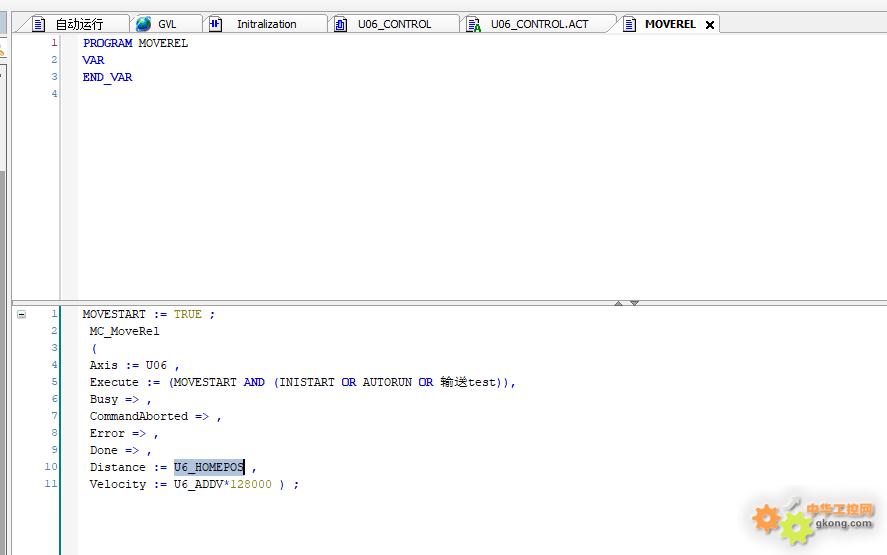
方案2 用I0做中断事件 事件触发task任务 里面做一个相对定位.
所以还得换方案..
最终用了
方案3

这5个功能块的动作..将驱动器上原来远点的参数 从24改成1C
回零的时候先setposition 然后走一个很长的相对位移..长到一定能碰到探针开关..
然后触发touchprobe功能块.当碰到探针开关之后传出当前位置.将当前位置叠加我想要的偏移量走一个绝对定位
绝对定位完成之后 再用setposition将设置为0
第一个setposition是为了先确定一个原点.不然使用ABS回报错.
由此 方案3彻底解决的定位卡顿 和准确性的问题.
最后修改:2022/6/21 11:33:20