登录
首页
PLC论坛
信捷XINJE
回帖
发帖
正文
主题:求教关于信捷伺服电子齿轮比
点击:4466 回复:17
楼主
编辑
引用
管理
风之子riCzPB
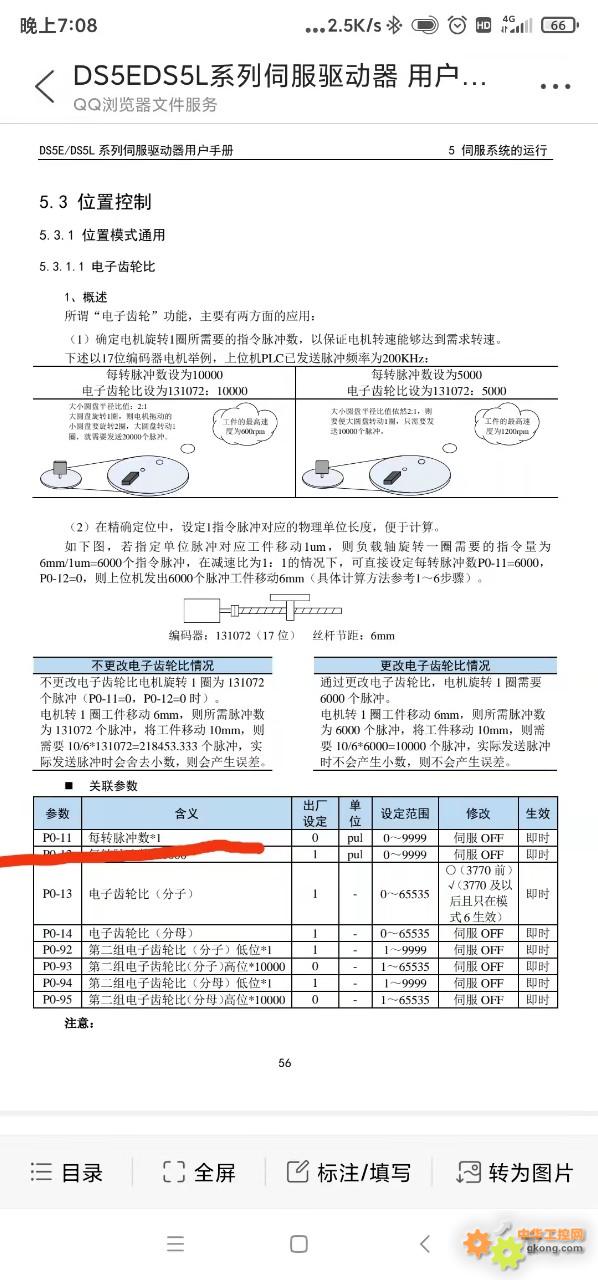
用户手册中电子齿轮比相关参数P0-11至P0-14,
当设定了P0-11=3000、P0-12=0后,因为优先级后面的P0-13、P0-14就不用了,
那这个电子齿轮比是多少啊?是一个变量么?
最后修改:
2021/12/6 12:11:25
21-12-06 11:49
1楼
编辑
引用
管理
风之子riCzPB
还有我们公司现有一台非标设备,触摸屏里面设置了丝杆螺距、电子齿轮比的变量参数,我想知道像丝杆的螺距不是固定的么?怎么可以设置成变量的?电子齿轮比也是变量,求教是为什么?谢谢!
21-12-06 12:15
2楼
编辑
引用
管理
liuyang7946
就是为了方便程序通用,不同的设备不同的螺距啥的,设置一下就行,不用改程序
21-12-06 13:11
3楼
编辑
引用
管理
蛇会大学
去A位置间隙是什么意思?
21-12-06 13:25
4楼
编辑
引用
管理
风之子riCzPB
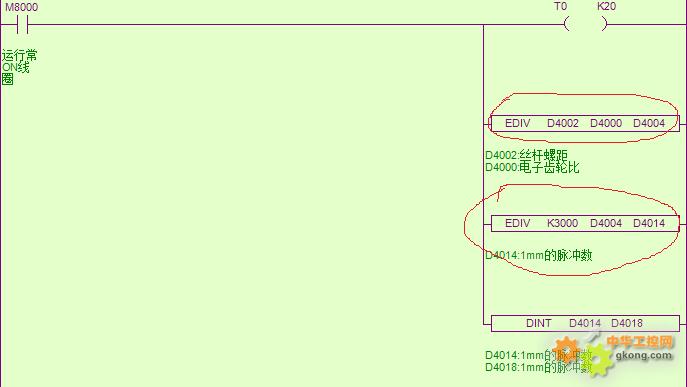
那电子齿轮比这个参数也是为了方便设备通用么?还有伺服P0-11(每转脉冲数)设置了3000后,就不用P0-13/P0-14这个电子齿轮比了,怎么PLC程序中还有这个D4000这个参数啊?这个PLC程序算法是固定的么?
21-12-06 13:42
5楼
编辑
引用
管理
chengfeil123
应该是精度上的间隙补偿设定
21-12-06 13:48
6楼
编辑
引用
管理
风之子riCzPB
设备从B点→A点时,要先动一点距离来清零拉力计(清零时拉力计不能受力),所以有个间隙位置
21-12-06 13:52
7楼
编辑
引用
管理
YXBK
当设定了P0-11=3000、P0-12=0后,因为优先级后面的P0-13、P0-14就不用了,
那这个电子齿轮比是多少啊?
这时不叫齿轮比了,就是电机转一圈需要PLC发3000个脉冲。
是一个变量么?
可以说是变量,根据实际要求改变设定。
那电子齿轮比这个参数也是为了方便设备通用么?
肯定是为了方便通用。
还有我们公司现有一台非标设备,触摸屏里面设置了丝杆螺距、电子齿轮比的变量参数,我想知道像丝杆的螺距不是固定的么?
有些设备可能是用的不同螺距。
还有伺服P0-11(每转脉冲数)设置了3000后,就不用P0-13/P0-14这个电子齿轮比了,怎么PLC程序中还有这个D4000这个参数啊?
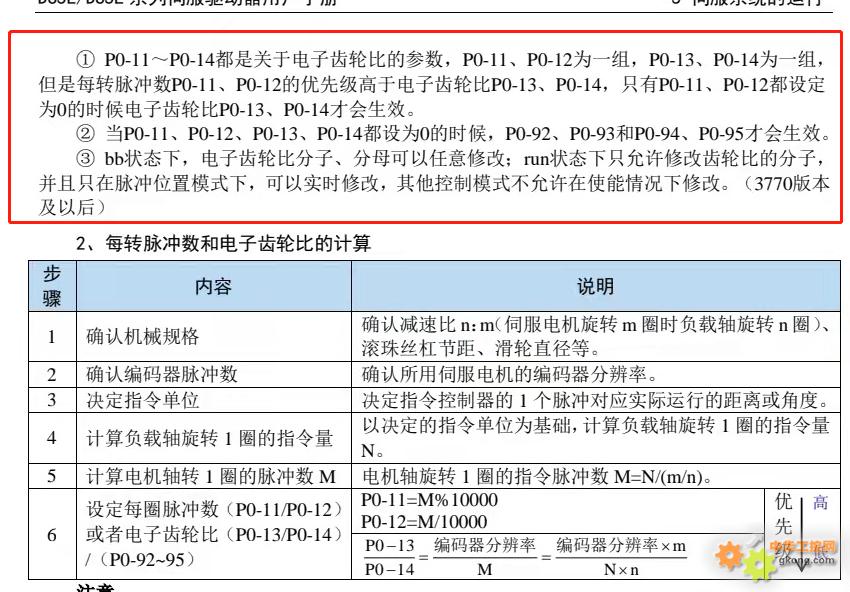
设置电机转一圈的脉冲数后PLC并不知道呀,而实际中是要转换成工程单位的,比如实际中是输入多少MM的距离,那就还要算螺距、减速比等等才能换算。
这个PLC程序算法是固定的么?
算法公式是固定的,但里面的数据是可以改变的,比如换了丝杆螺距就要改变D4002的值。
最早的伺服是讲电子齿轮比,后来才发明了一圈多少脉冲数,意义是一样的,只是后者比前者更直观、简单。
21-12-06 14:13
8楼
编辑
引用
管理
风之子riCzPB
谢谢这么详细的讲解,还有一点,之前有人给我解释了下程序算法,其中“电子齿轮比=电机一圈脉冲个数/伺服分辨率”,按照电子齿轮的算法:负载轴转一圈上位机发送脉冲数*电子齿轮比=编码器分辨率,这样分子分母就反了,是不是第一个“伺服分辨率”不是编码器分辨率?
21-12-06 14:46
9楼
编辑
引用
管理
蛇会大学
做过自动化的都知道,机械工程师会经常改硬件,今天用的1:10的减速,明天可能换成1:100的,所以在程序中,用输入的变量去适应这些硬件的变化,这是很正常的事
21-12-06 15:23
上一页
下一页
工控新闻
11月26日-29日来大湾区工博会,看2000+全球参展企业的“新鲜货”
西克 | Ranger3高速彩色3D相机——Ranger3-80
工信部:鼓励制造业企业深化对外投资合作
BIS-6690P-B10:适用于高效处理和泛在连接的桌面型工控机
施耐德电气:技术引领,场景驱动,让AI“触手可及”
人形机器人进军职场,福兮祸兮?
工业机器人市占率反转, “第五大家族”会在中国出现吗?
展会预告| 西克在Bauma上海宝马工程机械展约定您
更多新闻资讯