
台达A2伺服,运行过程中由位置控制模式转为速度控制模式,怎样才能让输出的速度平滑过渡?也就是象变频器的斜坡加减速那样的效果,不然速度骤变会导致机械部分的撞击。如果速度模式的速度指令是零,就减速停止?请各位大侠支招,谢谢!
20-02-14 18:26

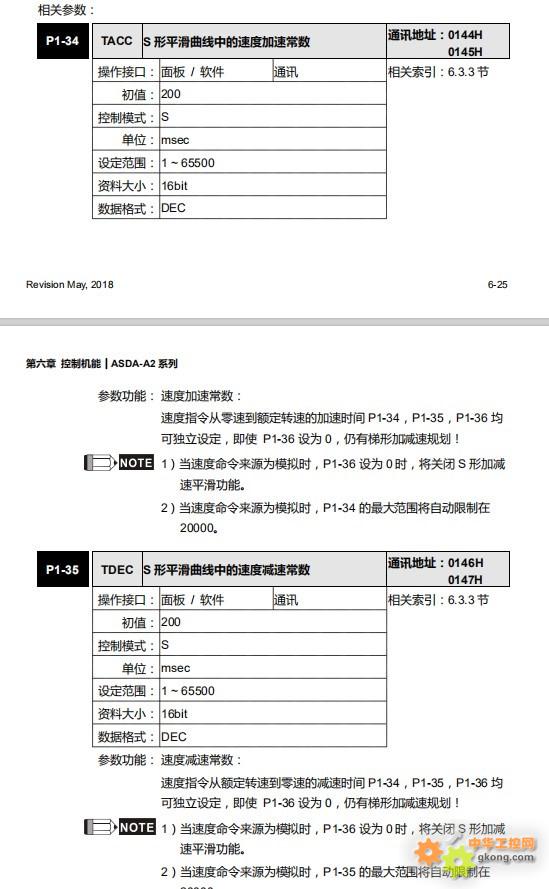

每个参数都有适用的模式,加减速时间和S形加减速常数都是只适用于速度模式,并且试着改变其值在位置模式也根本没有任何效果
最后修改:2020/2/16 22:34:23
20-02-16 22:12
引用 李东泽 在 2020/2/16 19:15:22 发言【内容省略】
处于位置模式的速度是由输入脉冲频率决定的,怎样才能在输入脉冲频率不变的情况下让驱动器减速停止或自由停车呢?伺服一直ON的。停顿一下可以,关键是要缓停。不能对设备造成机械冲击。毕竟电气部分的功能要以工艺流程为目标。
20-02-16 22:37
简要介绍一下:这个设备是一条联动线,由前后两部分组成。前面的设备电机尾部的编码器做为后部分的脉冲来源,用于两部分速度同步的依据。原来用的驱动器是台达AB系列的,因电气故障就换成A2系列的(CN1信号接口相同)。二者参数有较大差异,相应修改后,在模式转换上怎样也不能达到原来的效果。在不改变PLC的程序和操作手法的情况下,换驱动器只在驱动器上改变参数,力争达到原来的效果
20-02-16 22:53
引用 yueyukui 在 2020/2/16 22:37:35 发言【内容省略】
位置模式是你发多少脉冲,伺服驱动器就控制伺服电机走多少。肯定是停止到你指定的位置。楼主要求的缓停,可以根据现场调试情况,调节伺服驱动器参数的加减速,或者PLC程序里面设置加减速时间。
这个看你用的那种PLC
20-02-17 08:08
引用 yueyukui 在 2020/2/16 22:53:06 发言【内容省略】
台达Ab系列已经停产了,只能用A2系列代替了,可以用台达伺服编程软件,读取Ab伺服驱动器参数,然后根据读取参数,修改A2伺服驱动器参数
20-02-17 08:11
不明白你这套系统为何要在两种模式下切换工作。既然是前端设备A的编码器脉冲输入给后面的伺服。那么直接走一个模式就好了。
直接走位置模式就行。前端设备A的编码器脉冲的频率就直接决定后面伺服的速度了。参数就只需要设置简单的几个参数就好了。
根本不需要设定什么伺服加减速时间。
当然,我这说法是基于你这些信息。
我用伺服做位置控制一个设备,走A,B两个位置,要求是A,B两个位置是变量,同时行走的速度也是实时变化,即位置和速度同时在变化。随时启动随时停止,随时加速,随时减速,同时位置随时在变。这几个“随时”又同时发生。用的也是台达伺服。其实伺服就设定了几个参数而已:
一个是设为脉冲加方向的模式,一个是设置了一转多少个脉冲(当时设置的是2500P/R)。仅此而已。就可以实现上述要求。
直接走位置模式就行。前端设备A的编码器脉冲的频率就直接决定后面伺服的速度了。参数就只需要设置简单的几个参数就好了。
根本不需要设定什么伺服加减速时间。
当然,我这说法是基于你这些信息。
我用伺服做位置控制一个设备,走A,B两个位置,要求是A,B两个位置是变量,同时行走的速度也是实时变化,即位置和速度同时在变化。随时启动随时停止,随时加速,随时减速,同时位置随时在变。这几个“随时”又同时发生。用的也是台达伺服。其实伺服就设定了几个参数而已:
一个是设为脉冲加方向的模式,一个是设置了一转多少个脉冲(当时设置的是2500P/R)。仅此而已。就可以实现上述要求。
20-02-17 20:19