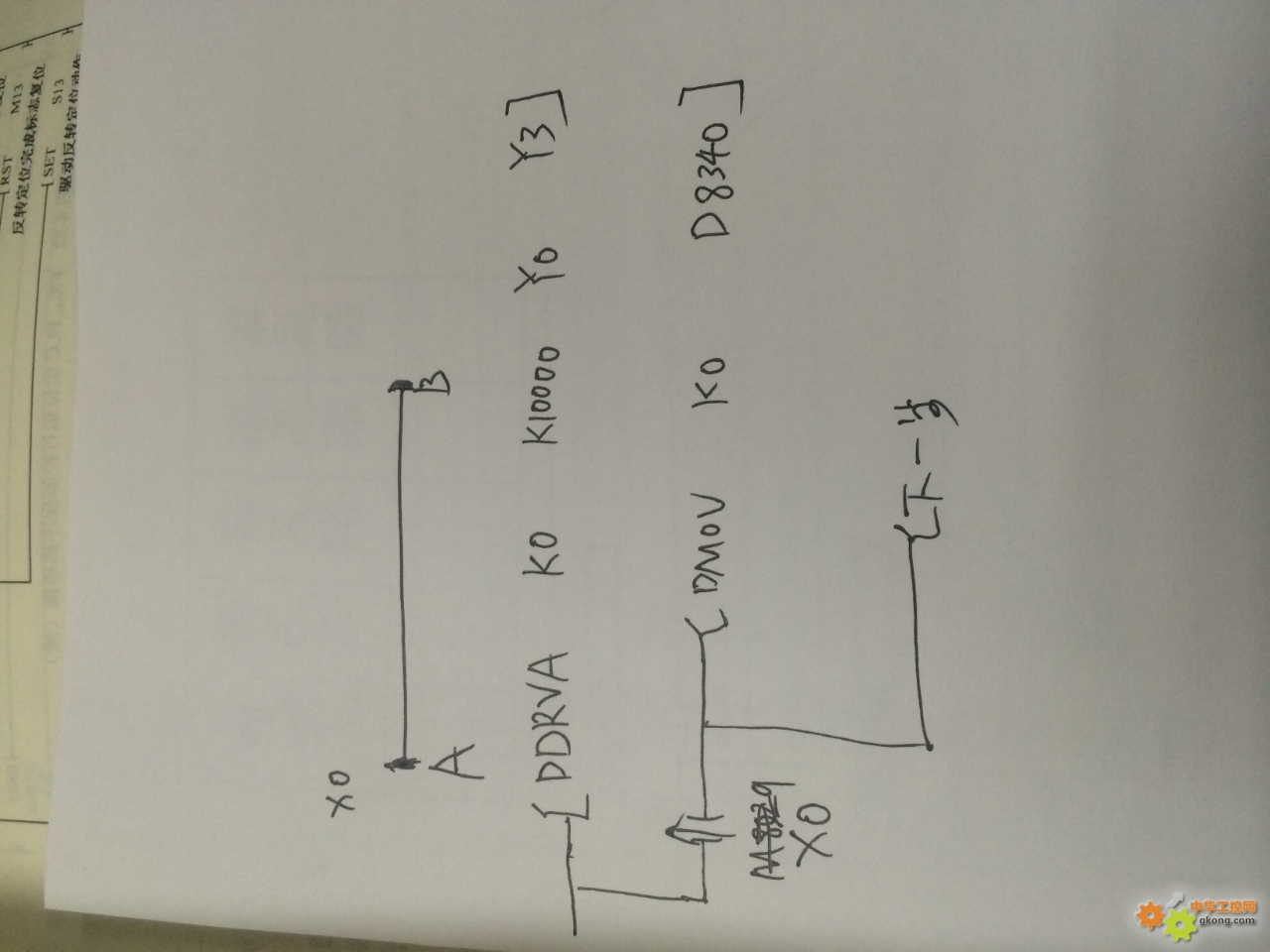
如图,伺服做A点到B点往复运动,A点装了个检测开关X0,现在我用如图程序来实现B点到A点,并用检测信号上升延清除D8340脉冲信号,再从A点定位到B点现在是发现重复多次后,到B点位置经常跑多了,把X0上升延改成脉冲完成标识M8029也是一样,求助这个应该怎么写比较好啊,急,望大家指导,谢谢
17-02-18 11:52
点击:1193 回复:13