
各位好:
我现在遇到一个问题,请大家指教一下。
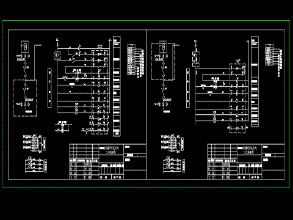
PLC是FX3U,伺服驱动器是台达ASDA-B2,伺服电机也是台达的。
电机装上50:1的减速箱,然后通过皮带带动转盘转动。
回零点问题:使用DZRN指令转盘回零的的位置有时不准确,有时准确,原点开关使用普通三线式接近开关。
定位偏差问题:转盘转动都有那位5度左右的偏差。
我查了一下,把ASDA-B2的P0-02分别设为0和1,查到输入脉冲和反馈脉冲是和PLC一致的。
想问一下这种情况下是不是要加全闭环控制?如果要应该怎么加?
除了全闭环控制外还有其它方法吗?
谢谢!




机械误差,在通电状态下,用手转动转盘,就可以明显感觉到用晃动。减速机做分机构,难度很大的。可以做,但要增加一个定位机构。这个与什么伺服电机一点关系都没有,并且转速越快,误差越大;转盘越重,误差越大;转盘直径越大,误差也是越大。
再细看了一下你的贴子,说明机械设计的人也不懂转盘,即然采用了伺服电机,为什么还要用皮带轮去带动转盘?而且是加减速机的?
再细看了一下你的贴子,说明机械设计的人也不懂转盘,即然采用了伺服电机,为什么还要用皮带轮去带动转盘?而且是加减速机的?
最后修改:2016/1/25 20:37:50
16-01-25 20:33
版主大大:
请你帮我再看一下这个算脉冲当量正不正确:
转盘均分5个工位,每分72度,伺服(台达ASDA-B2),通过
50:1的行星减速机,后通过皮带带动转盘转动。
固有的脉冲当量是360度/(160000*50)=0.000045度/PLS
(B2的回授脉冲是160000)。
电子齿轮分子:160000,分母7200,那么电子齿轮后
的脉冲当量是0.001度/PLS。那个每个工位我发7200个
脉冲就可以转72度
请你帮我再看一下这个算脉冲当量正不正确:
转盘均分5个工位,每分72度,伺服(台达ASDA-B2),通过
50:1的行星减速机,后通过皮带带动转盘转动。
固有的脉冲当量是360度/(160000*50)=0.000045度/PLS
(B2的回授脉冲是160000)。
电子齿轮分子:160000,分母7200,那么电子齿轮后
的脉冲当量是0.001度/PLS。那个每个工位我发7200个
脉冲就可以转72度
16-01-26 10:37