
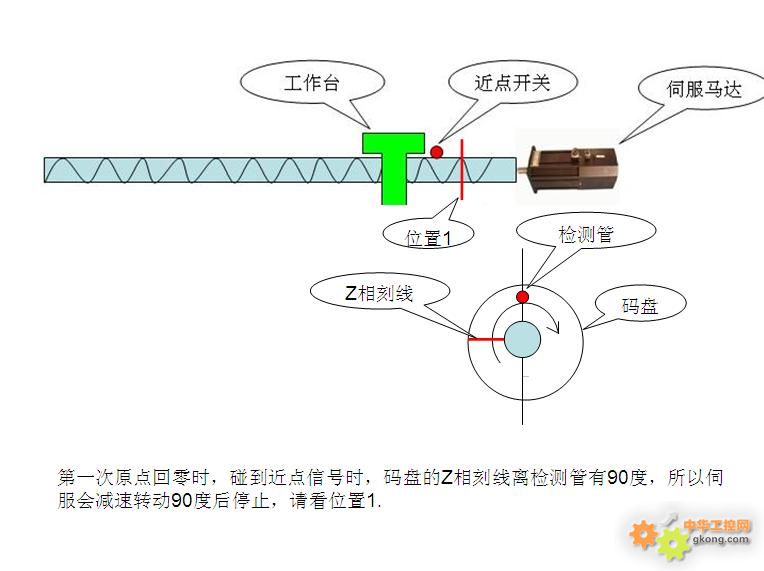
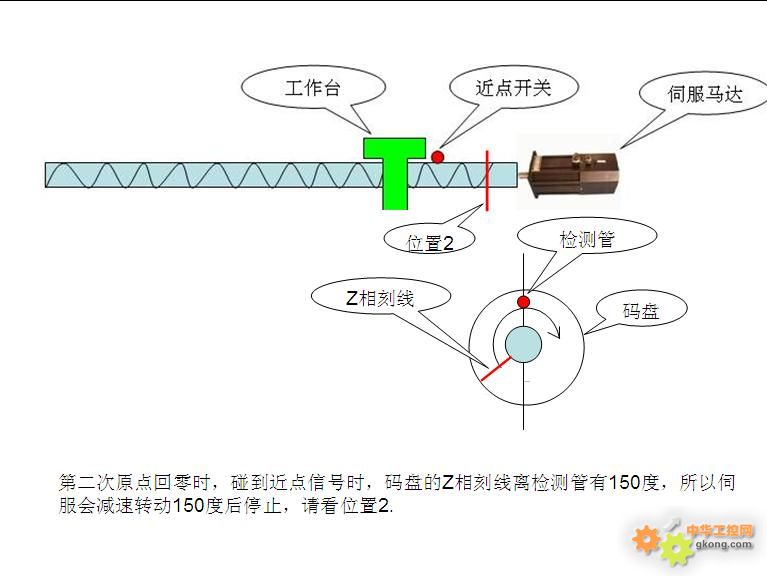
伺服想精确的回原点,用伺服的Z相脉冲怎么来实现?伺服电机转动一圈,输出一个Z相脉冲信号。假设伺服电机第一次找原点,碰到近点信号时,编码器码盘正好离Z相脉冲刻线还有180度,那么伺服电机会碰到近点信号后减速转动180度后输出Z相脉冲使伺服停止转动,比如这就是第一次回原点。假设伺服电机第2次找原点时,碰到近点信号时,编码器码盘离Z相脉冲刻线还有200度,那么伺服电机会减速转动200度后输出一个Z相脉冲停止。这样的话第一次回原点和第二次回原点的位置就不一样了啊。
实际伺服系统中怎么用这个Z相脉冲来实现原点定位呢?
大家在实际的伺服控制中都是怎么做原点控制的?
大家能详细的讲解一下,如何用近点信号+Z相脉冲来实现原点控制呢?希望大家给我个例子说明一下,谢谢了
09-08-19 11:27


我觉得这个原点回归并没有什么误差,出现的误差是近点信号反应时间的误差,所以出现了150和90的情况,但电机在这一圈之内Z信号出现的位置并没有改变,所以原点回归的位置时一致的。这也是Z信号存在的理由。
09-08-19 17:04


楼主在论坛里发了好几个同样的问题帖子,看来确实挺着急。从一开始我就关注这个问题。
首先伺服驱动器和电机只能构成一个半闭环的控制,要实现精确回原点,一种办法可以采用光栅尺反馈,光栅尺上有绝对零点。另一种方法是采用带多圈绝对值编码器的伺服电机。4096*4096圈,当前的位置信息都以二进制或格雷码形式反馈,位置都是唯一的,设定原点位置就可以做到。
Z相脉冲的作用只是计数。楼主使用的是带增量式编码器的伺服电机,通过记Z相脉冲的个数就可以计算伺服电机走过的圈数,再得出工件移动的位置,但这个位置是相对于零点的位置,这种电机每次开机后要寻零。Z相脉冲并不能起到找原点的作用。
首先伺服驱动器和电机只能构成一个半闭环的控制,要实现精确回原点,一种办法可以采用光栅尺反馈,光栅尺上有绝对零点。另一种方法是采用带多圈绝对值编码器的伺服电机。4096*4096圈,当前的位置信息都以二进制或格雷码形式反馈,位置都是唯一的,设定原点位置就可以做到。
Z相脉冲的作用只是计数。楼主使用的是带增量式编码器的伺服电机,通过记Z相脉冲的个数就可以计算伺服电机走过的圈数,再得出工件移动的位置,但这个位置是相对于零点的位置,这种电机每次开机后要寻零。Z相脉冲并不能起到找原点的作用。
09-08-24 08:47
