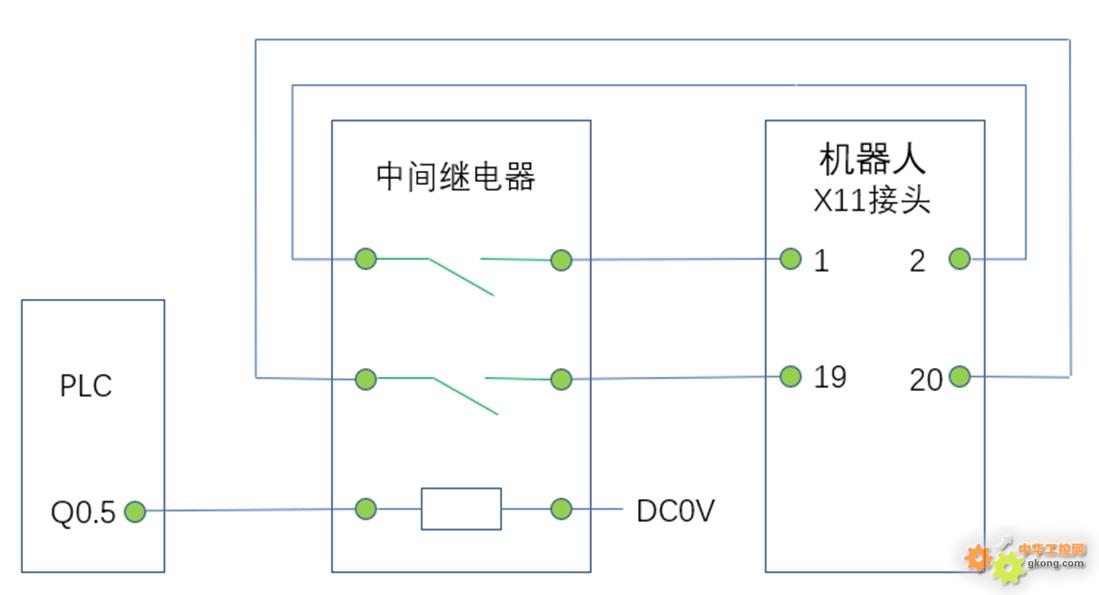
在设计之初,关于PLC与机器人安全互锁信号的设计电路如下:

1.正常状态下:安全光栅没有被遮挡,且急停按钮没有被按下,则PLC的Q0.5无输出,中间继电器的线圈不得电,其常闭触点保持闭合状态,机器人的外部急停信号没有断开,机器人可正常运行。
2.紧急情况下:当安全光栅被遮挡,或急停按钮被按下,PLC的Q0.5得电输出DC24V,中间继电器的线圈得电,其常闭触点断开,触发机器人的外部急停信号,机器人立刻报警停机。
后来,本人审核图纸时,发现有个安全隐患,若出现以下三种故障:
1)PLC的Q0.5烧坏;
2)或中间继电器的线圈烧坏;
3)或PLC与中间继电器的线路出故障;
机器人的外部急停将失效!起不到保护作用,危险!
最后修改:2024/8/15 10:28:30