登录
首页
PLC论坛
西门子SIEMENS
回帖
发帖
正文
主题:200smart运动goto指令驱动伺服定位完成的done位实现状态机转换
点击:2642 回复:4
楼主
编辑
引用
管理
matlac
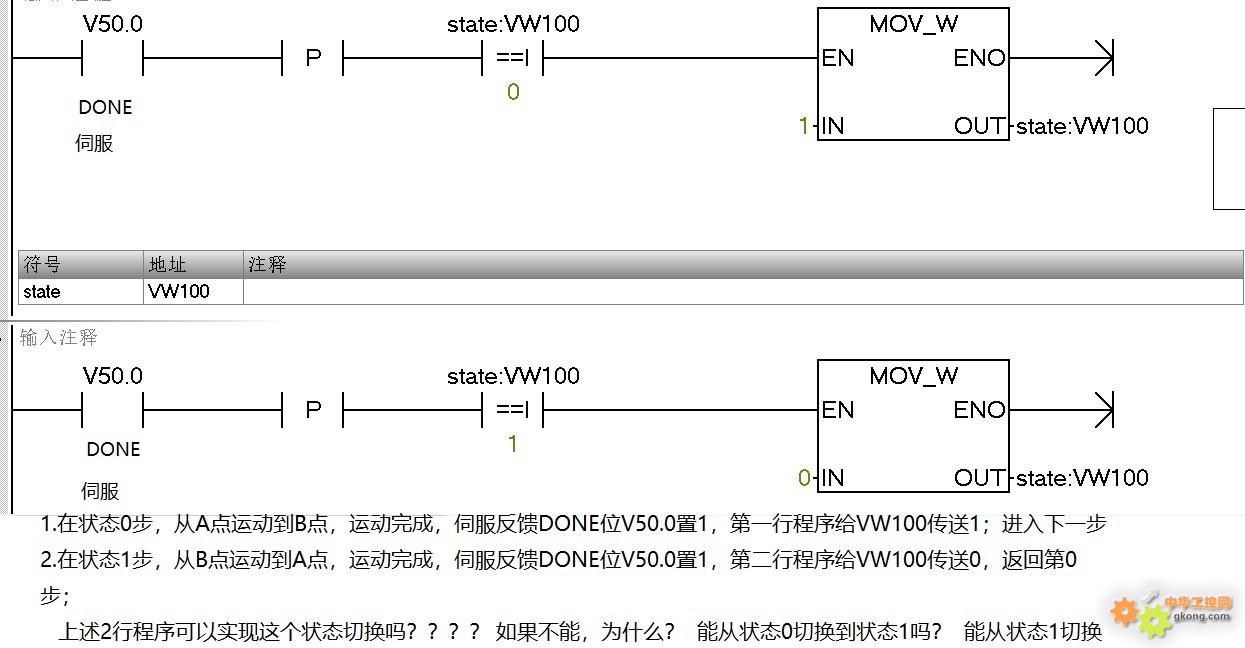
工艺要求是A点到B点之间来回运动, 状态一开始为0,然后从A点运动到B点,利用伺服完成位DONE的上升沿将状态变为1(vw100=1);
然后再从B点返回A点,利用利用goto指令驱动伺服完成位DONE的上升沿将状态变为0(vw100=0);
所以这里的伺服完成DONE位信号上升沿切换状态成了关键,程序就是2行,见图片,请大家指教这两行程序有什么问题,能否实现?为什么能实现?
如果不能实现,如何改进? 你觉得问题出现在哪里???
分析这个程序要深刻理解PLC程序的扫描逻辑
最后修改:
2021/3/8 13:49:53
21-03-08 10:46
1楼
编辑
引用
管理
liuyang7946
不能实现
21-03-09 09:03
2楼
编辑
引用
管理
管杀不管填
学习学习
21-03-12 10:17
3楼
编辑
引用
管理
420135833
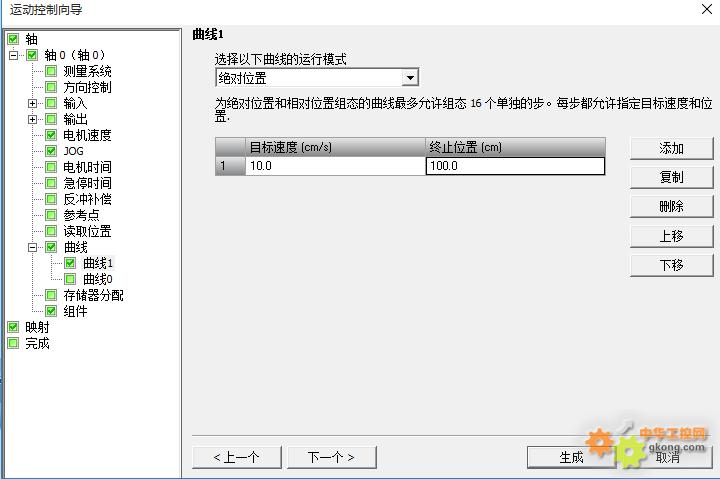
我感觉你运动控制这么单一,,还不如在运动向导里面设置两个曲线运动,,直接调用AXISX-RUN,,我是新手,不知对不对
21-04-29 19:44
4楼
编辑
引用
管理
jij0365674
不能,这个扫描到下面那行,直接赋值0了
21-05-05 16:41
工控新闻
链博会丨施耐德电气崔志达:技术创新赋能“中国制造”迈向“中国创造”
零碳园区成为新风口,创维光伏引领从0到1创新实践
工业阀门国家级重点专精特新“小巨人”企业 中德科技北交所IPO问询阶段
皮尔磁:氢能安全——未来能源的关键命题
「壳」动新智,聚势而行:AVEVA与中海壳牌举办高层会谈,共谋行业发展新动能
“国产PLC+工控鸿蒙”亮相第二十一届“工业自动化与标准化”研讨会
新能源电控业务表现亮眼,变频器厂商上半年净利预增51%-65%
Lantronix 首次推出经济实惠、屡获殊荣的 5G 无线路由器系列,颠覆工业连接方式
更多新闻资讯