登录
首页
PLC论坛
三菱Mitsubishi
回帖
发帖
正文
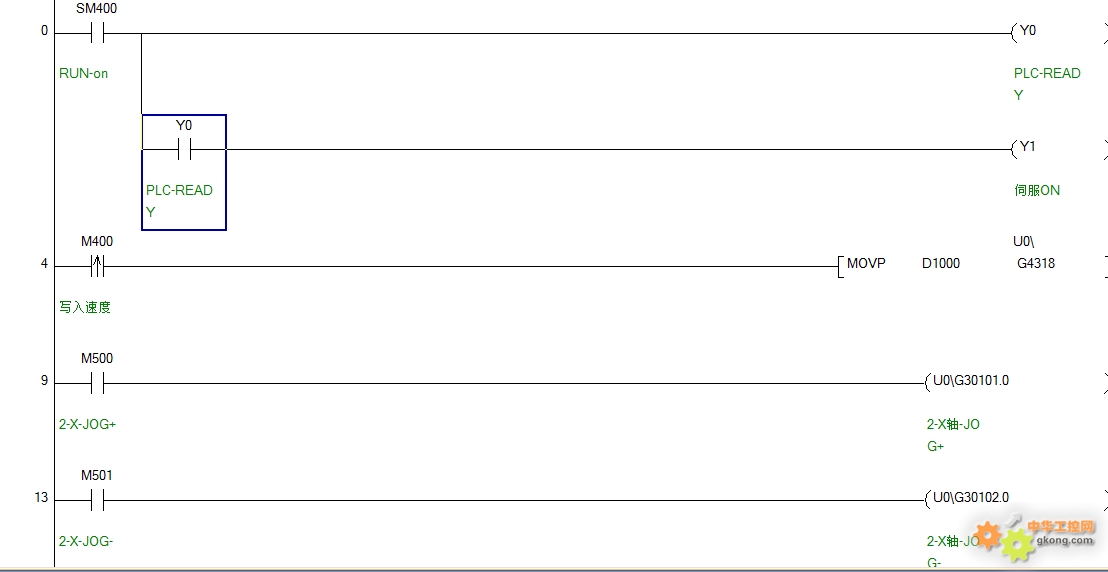
主题:QD16MS点动已好,怎么写原点复位和定位移动程序呀
点击:3254 回复:9
楼主
编辑
引用
管理
zblulei
QD16MS控制6台伺服,想知道怎么实现每台的手动正反转呀,告诉我一台的就可以。我这样写不知道哪儿错了,已启动就报警
最后修改:
2016/8/30 11:05:58
16-08-29 08:32
1楼
编辑
引用
管理
fumz78
QD77MS16吧,点动之前要设置点动速度,然后通过缓冲区启动
启动报警是什么代码?
16-08-29 08:48
2楼
编辑
引用
管理
MIC小赖
真的够奢侈,如果简单定位的话两个QD75D4都不如一个QD77MS16贵吧
16-08-29 09:19
3楼
编辑
引用
管理
fumz78
引用
MIC小赖
在 2016/8/29 9:19:32 发言
【内容省略】
两个QD75D4N和QD77MS16价格差不多的。QD77MS16功能要更多些。
16-08-29 09:41
4楼
编辑
引用
管理
MIC小赖
拓展性么,我们一般16轴电子凸轮的时候才会用到77MS16,还是LD77MS16。
16-08-29 09:45
5楼
编辑
引用
管理
fumz78
凸轮是其中多的功能,还有用光纤减少接线,维护方便,16轴以后如果增加也方便。
16-08-29 10:10
6楼
编辑
引用
管理
MIC小赖
那倒是没错,光纤总线配合J4B还是很好用。
16-08-29 11:35
7楼
编辑
引用
管理
aicaiming
引用
zblulei
在 2016/8/29 8:32:37 发言
【内容省略】
有模块中文手册吗?求分享
16-08-29 12:17
8楼
编辑
引用
管理
zblulei
点动已经调试好了,不知道原点定位程序怎么写,还有定位移怎么写
16-08-30 10:47
9楼
编辑
引用
管理
fumz78
正常定位程序可以在软件中设置定位表格中的数据
然后将这些表格的编号放到定位启动编号的缓冲区,再去启动对应的轴就可以
回原点有个特殊的代码9001,放到定位启动编号缓冲区。
16-08-30 13:55
工控新闻
海康机器人165kg/210kg大负载机器人登场
Vishay Gen 3 650 V和1200 V SiC肖特基二极管在提高效率的同时增强电绝缘性
国内首个!腾讯发布具身智能开放平台
施耐德电气:以AI赋能自动化生产向自主化运营转型
纵行科技正式加入西门子Xcelerator生态,共筑数字化与低碳化新未来
我国工控产业自力更“胜”
和利时助力吉林大安风光制绿氢合成氨一体化示范项目顺利投产
越疆科技深化全球布局,马来西亚子公司开业推动东南亚智能制造升级
更多新闻资讯