登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:【话题】快速搞定伺服控制环(20140606)
点击:4557 回复:31
楼主
编辑
引用
管理
mikezym
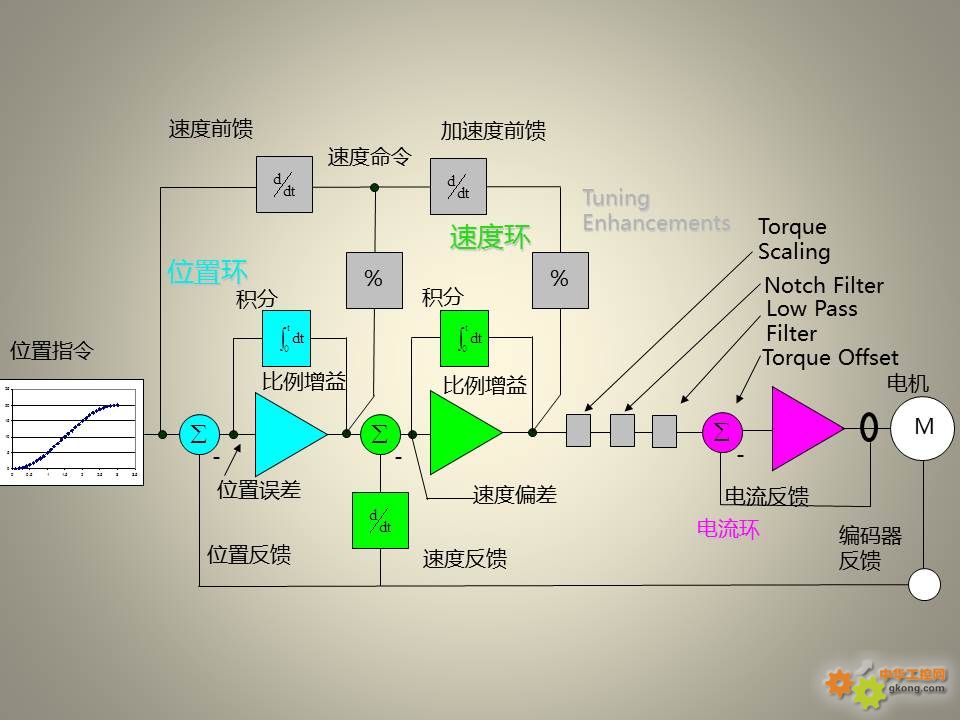
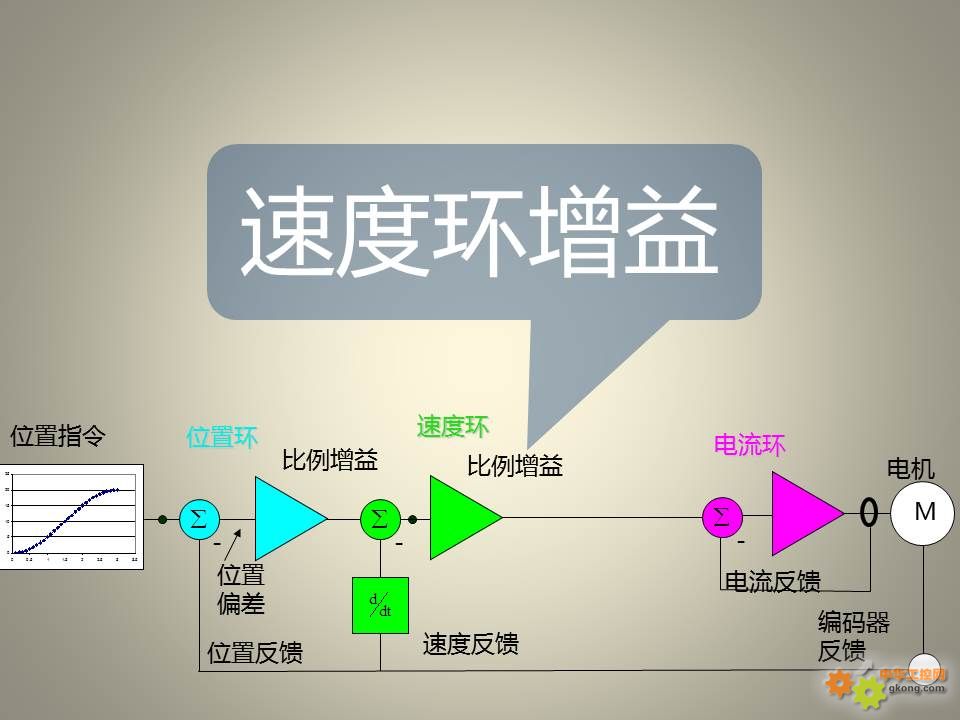
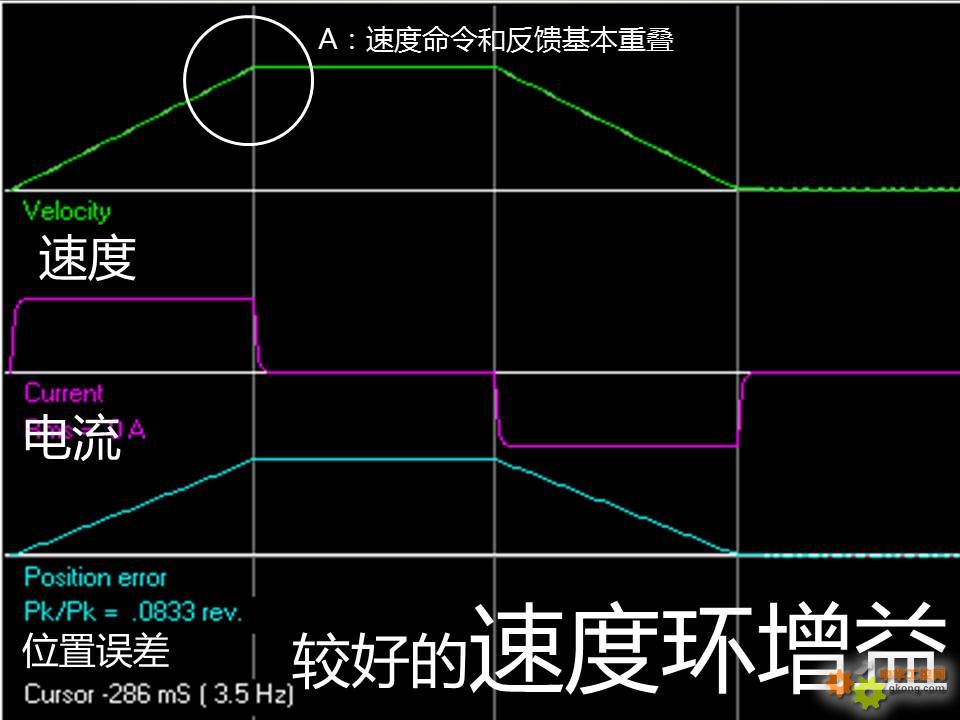
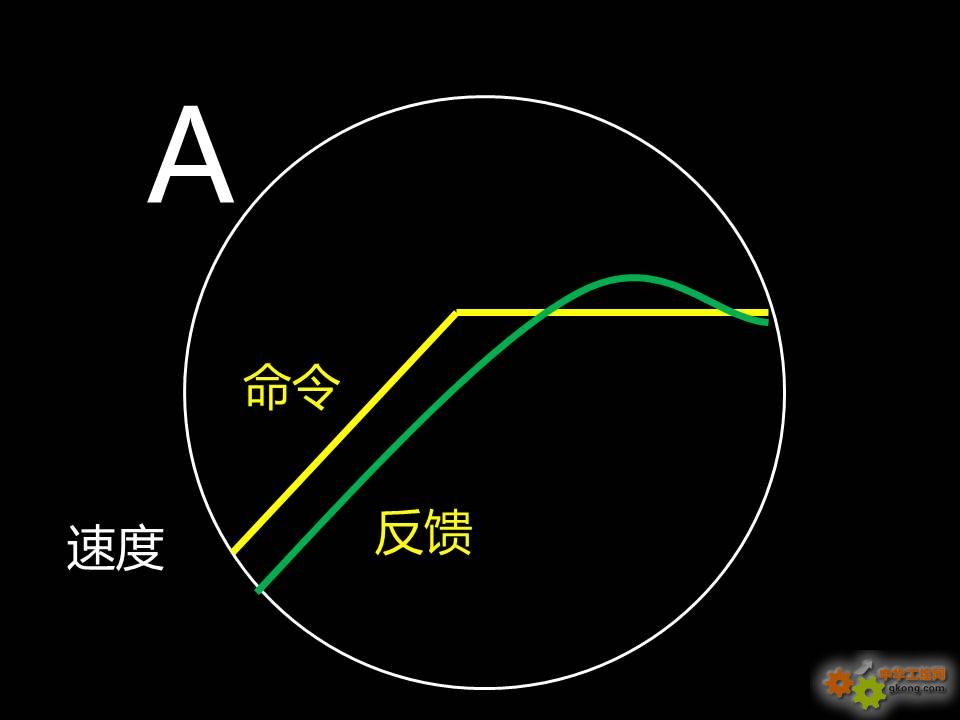
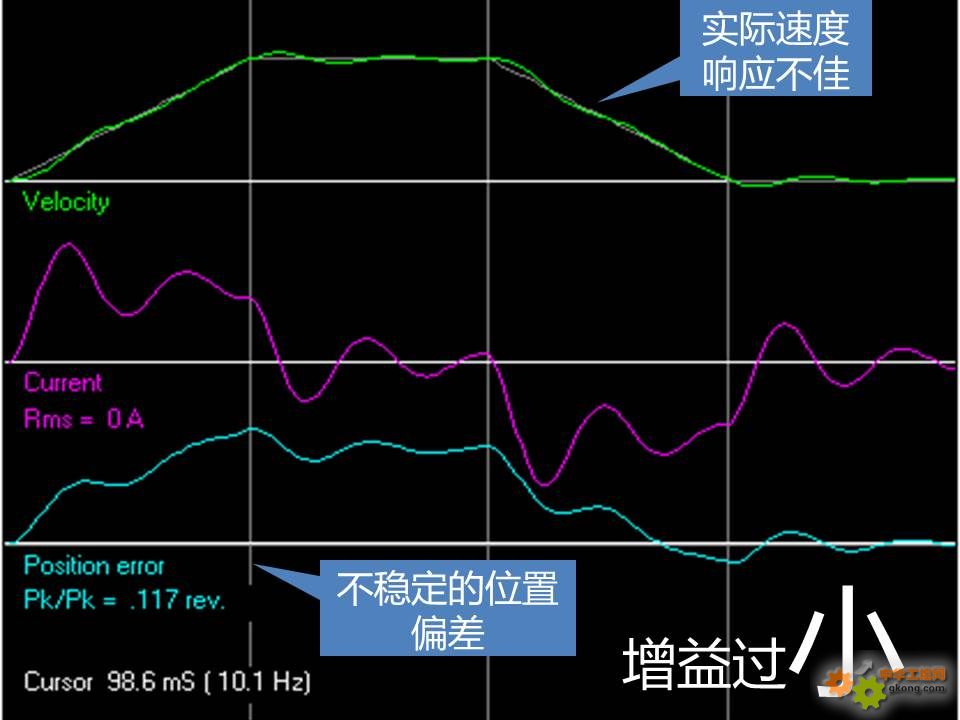
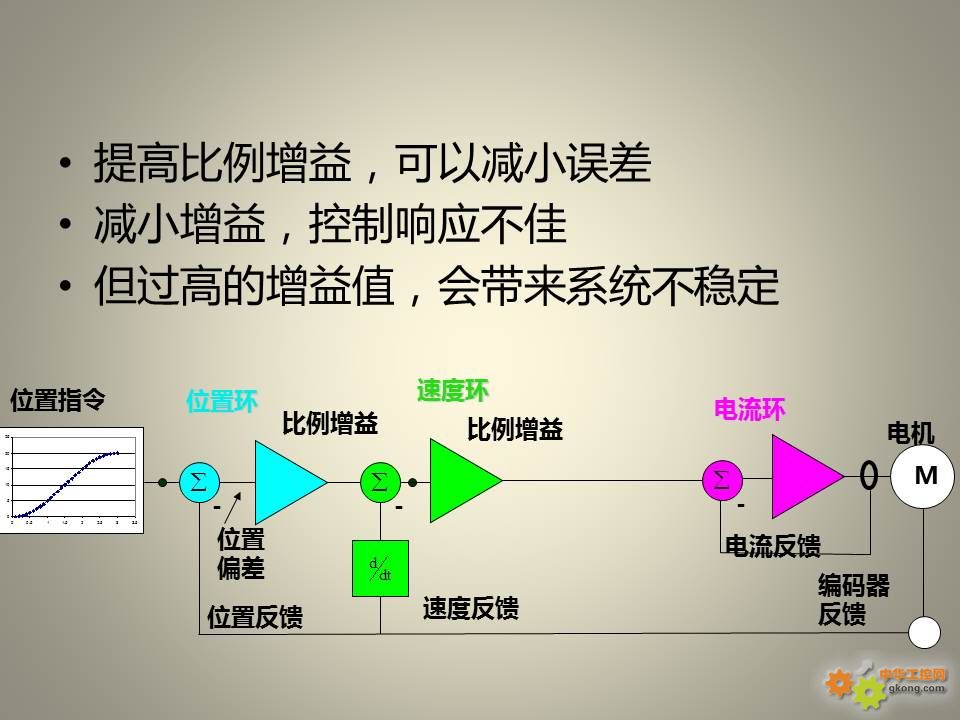
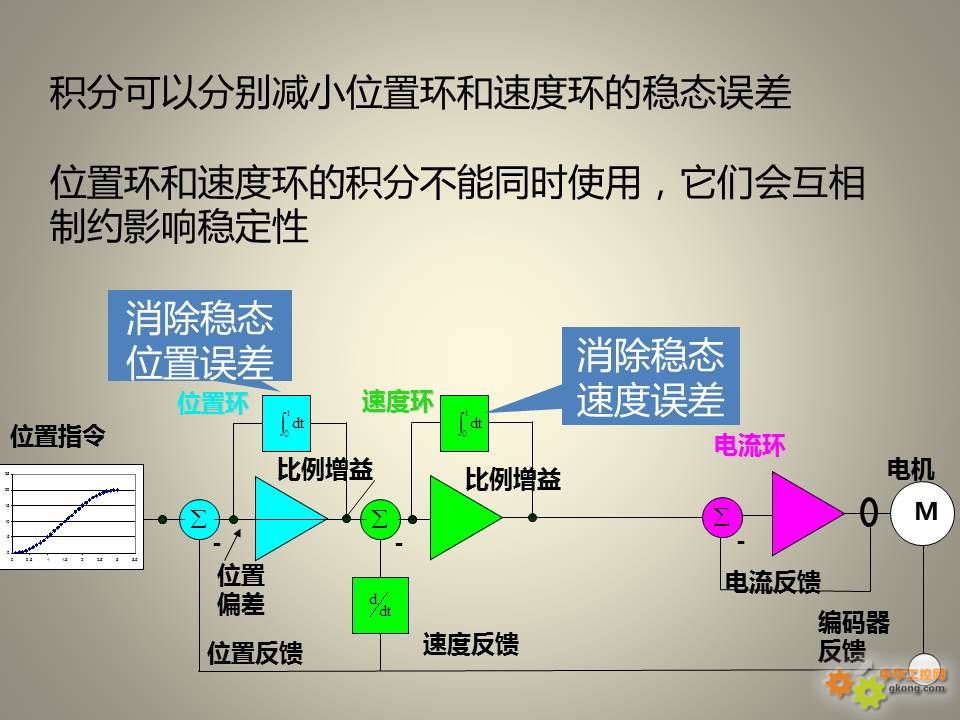
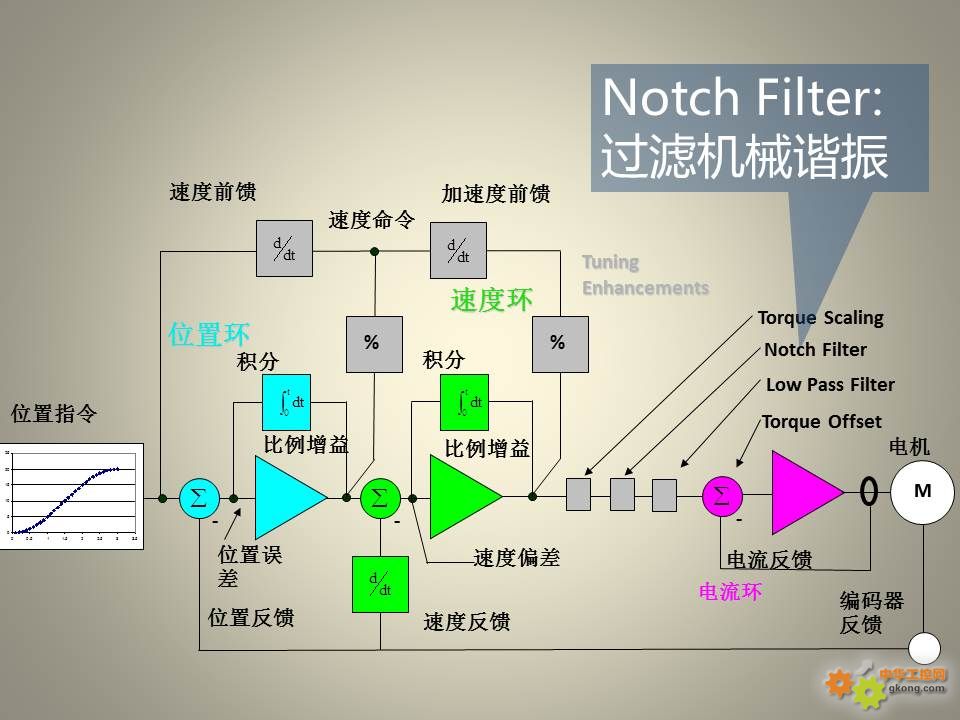
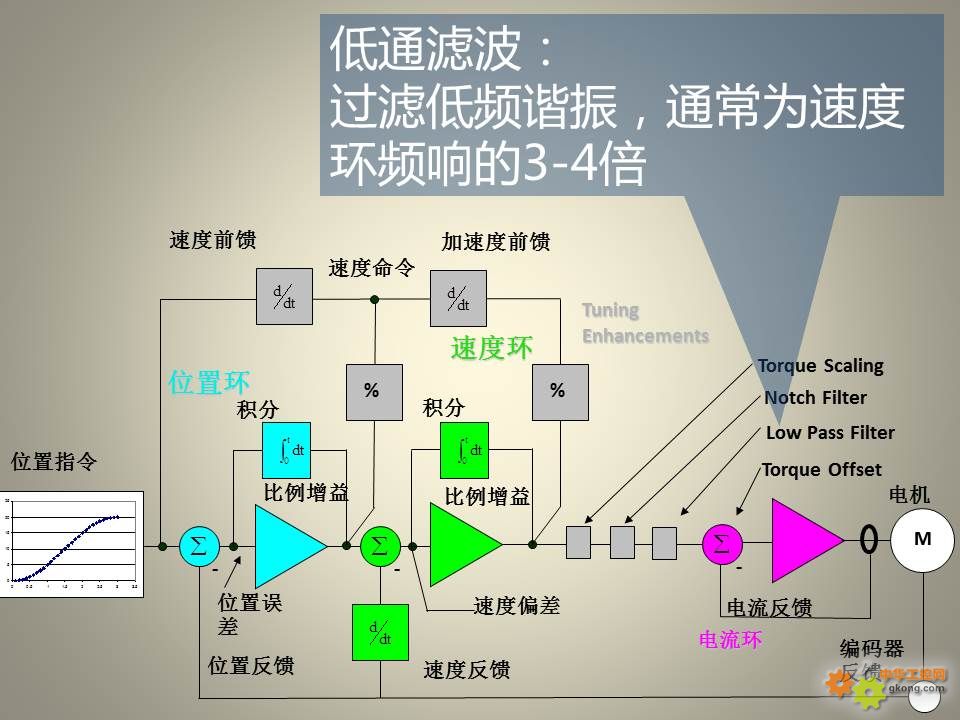
1.调整速度环增益,减小速度偏差
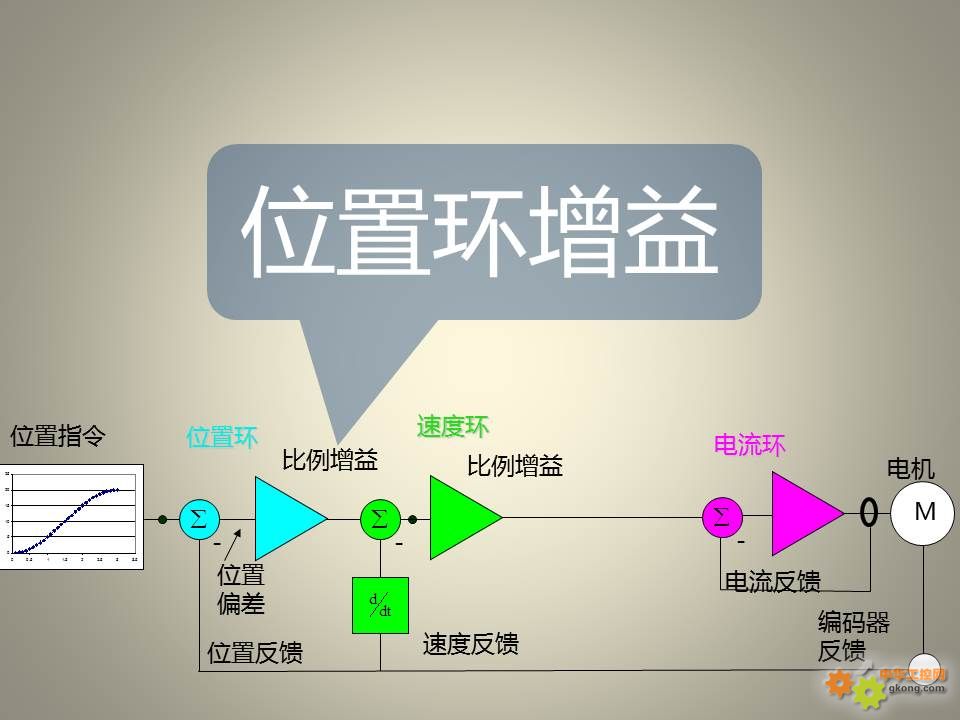
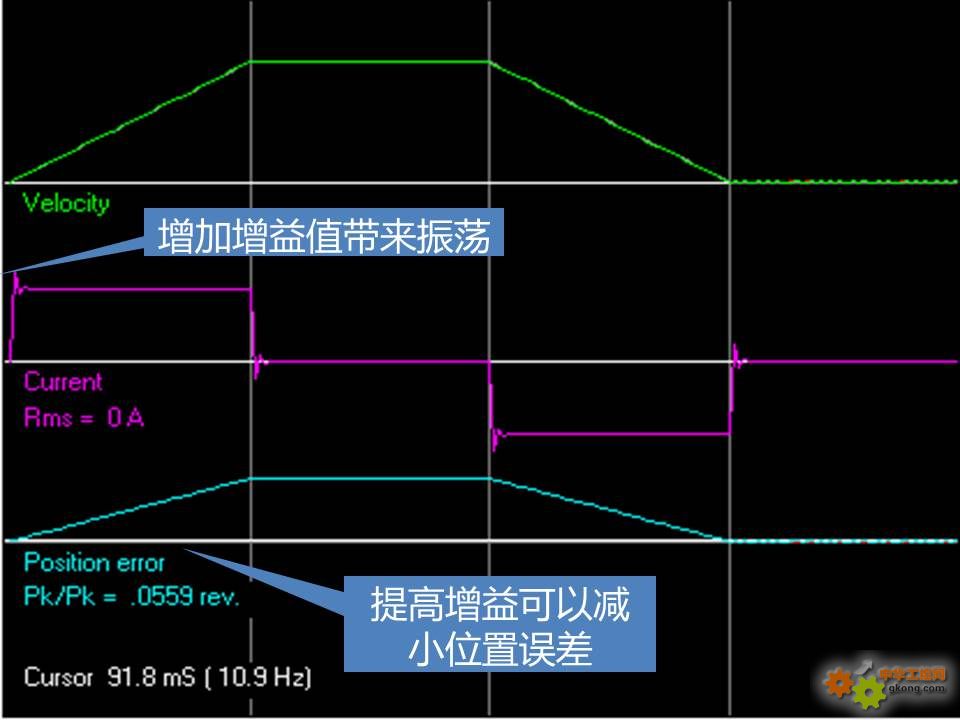
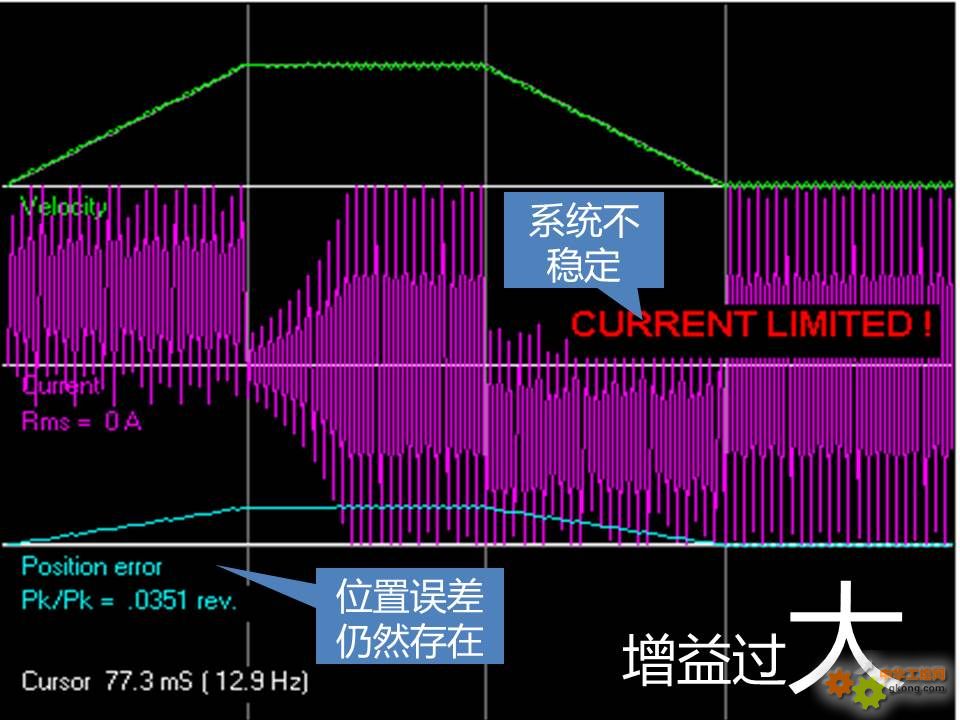
2.调整位置环增益,减小位置误差
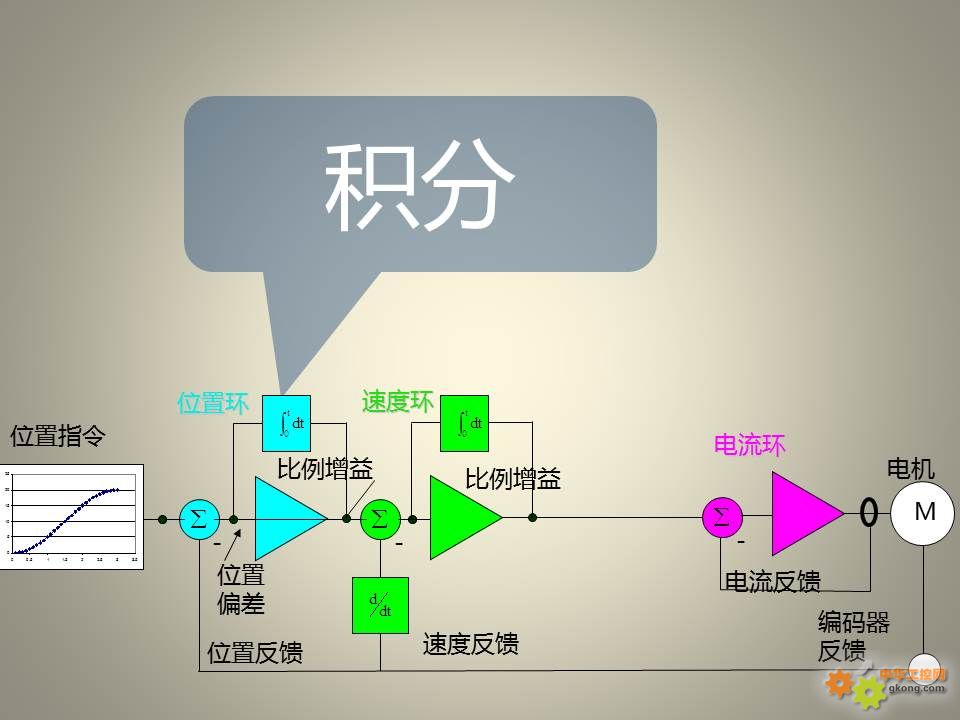
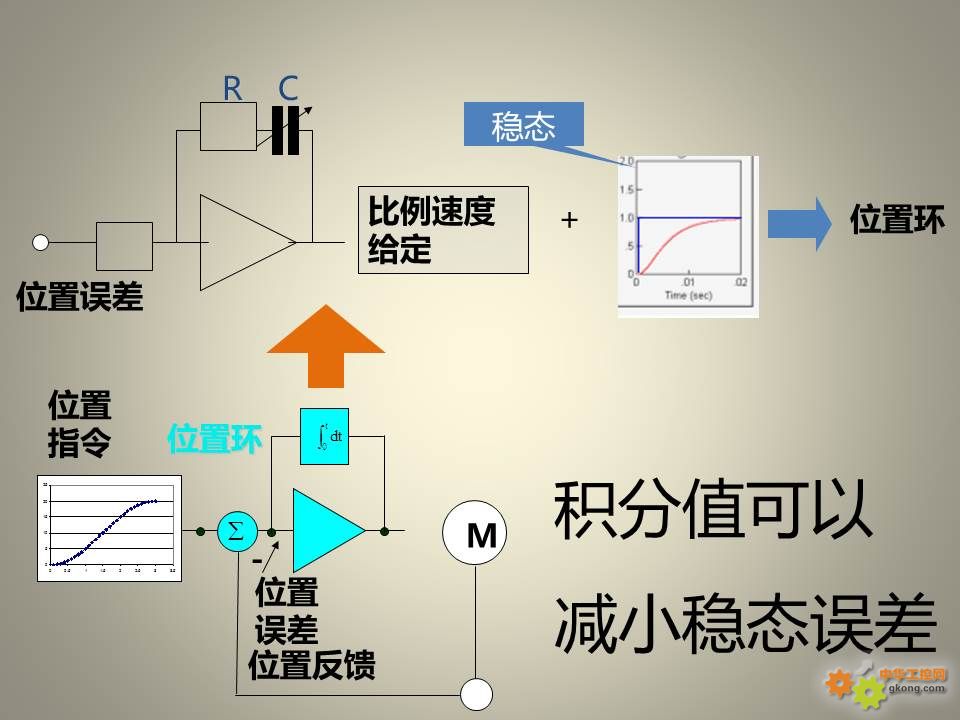
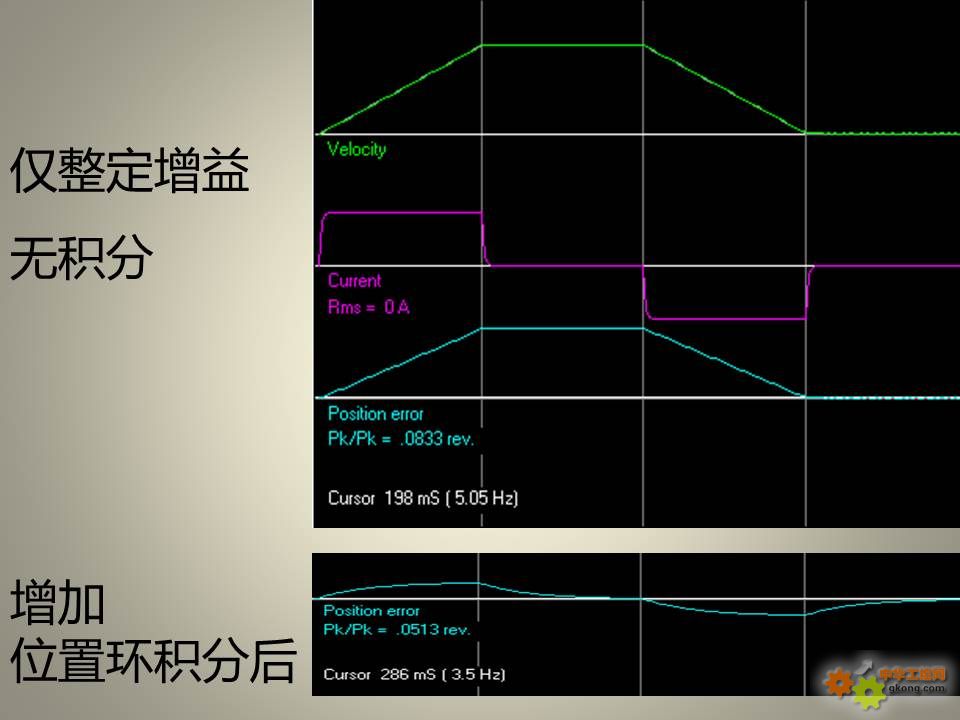
3.要进一步减小稳态误差,使用积分
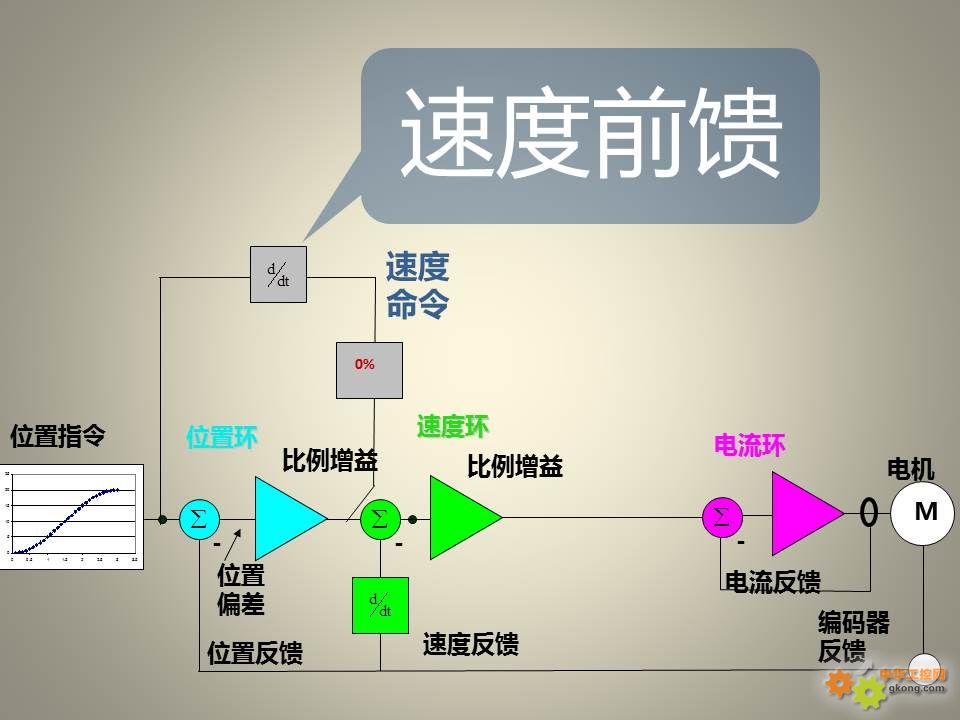
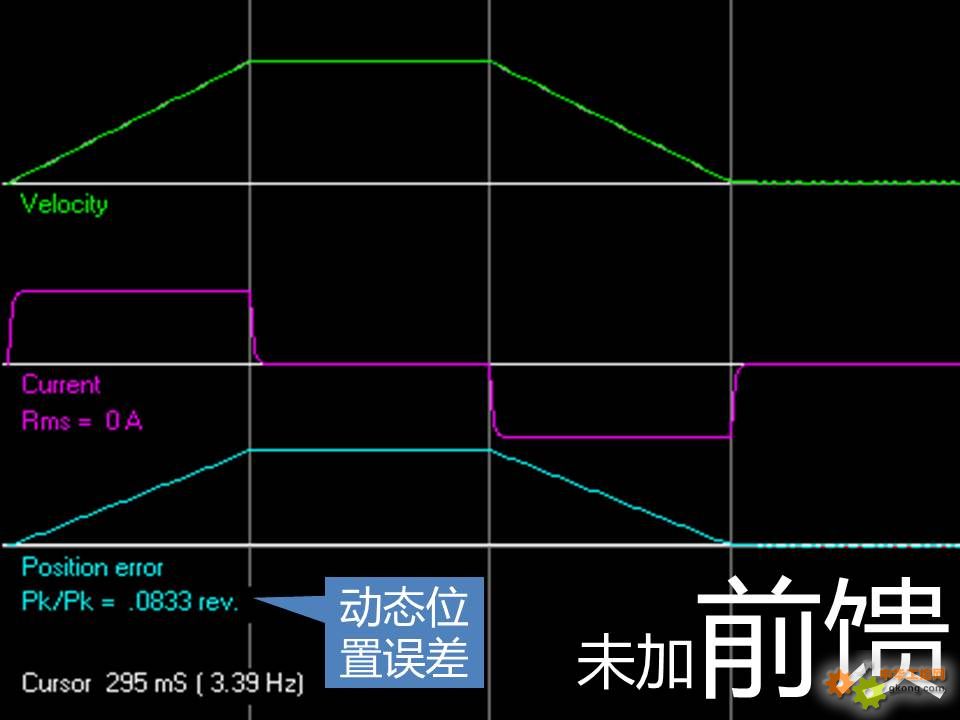
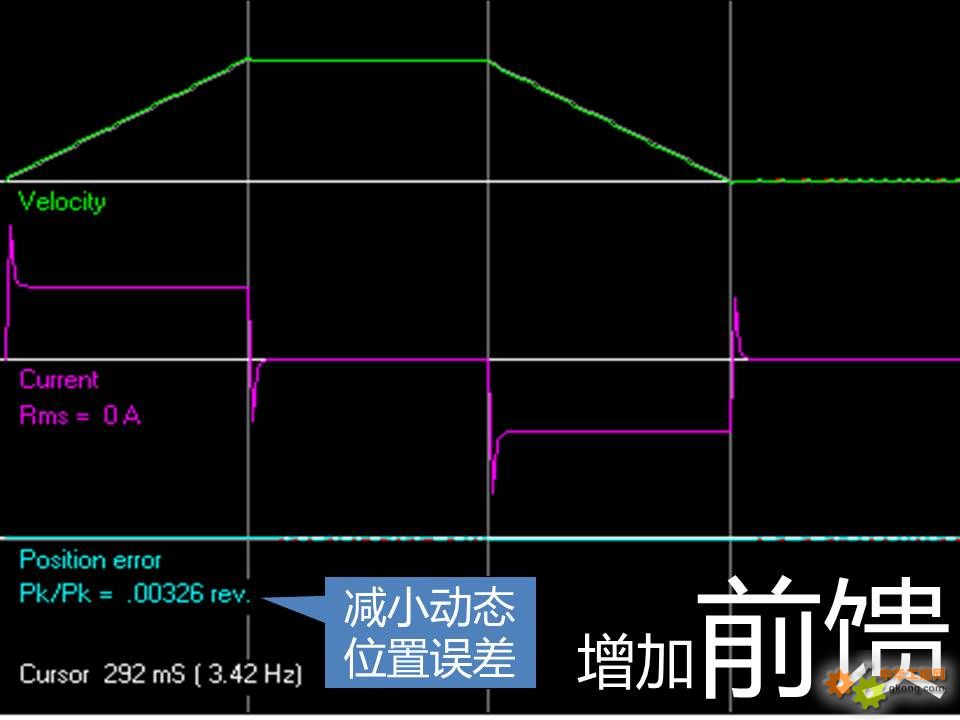
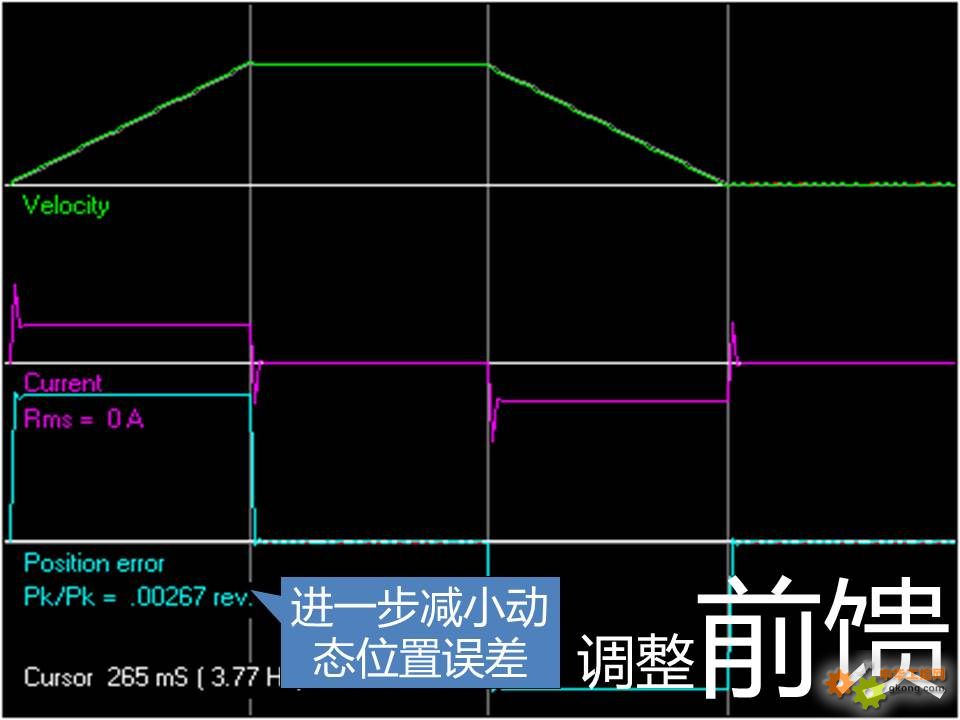
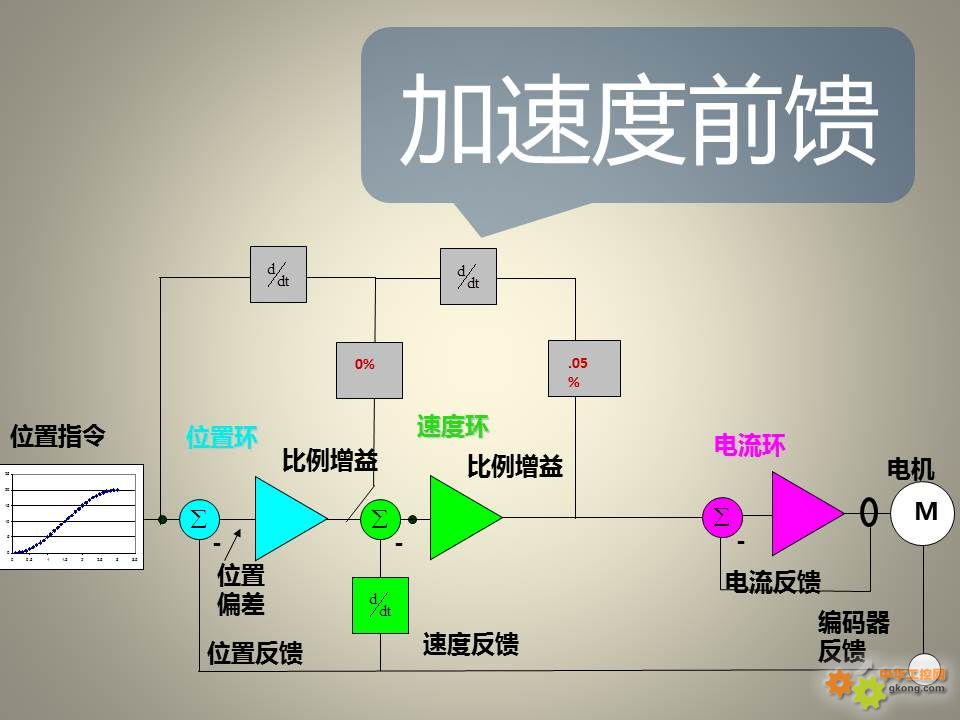
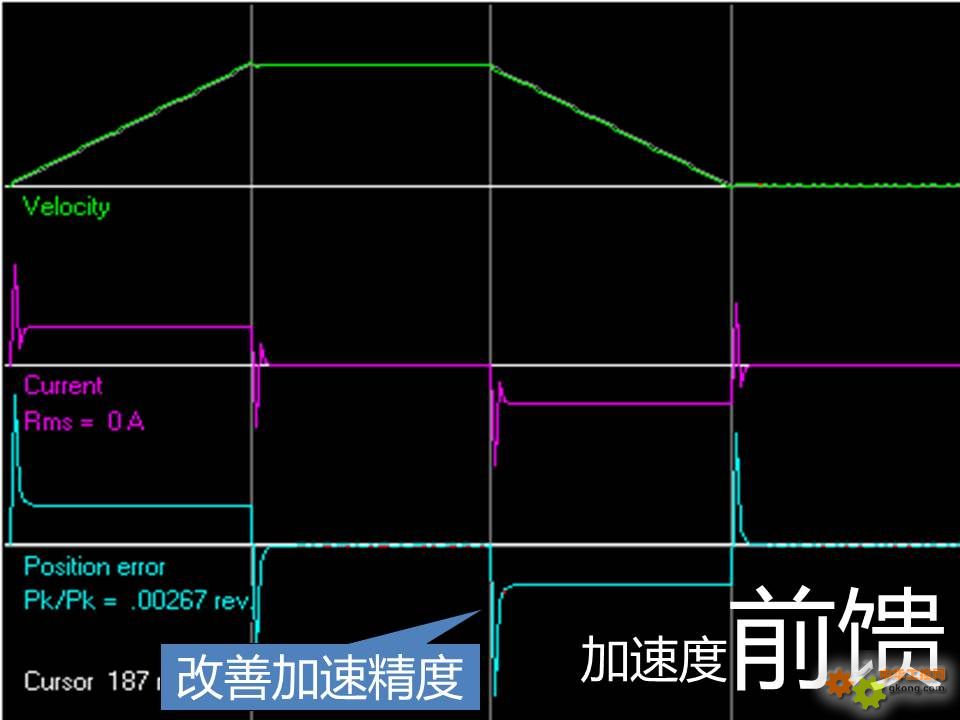
4.要进一步减小动态误差,使用前馈
5.前馈和积分不同时使用
6.速度环和位置环积分不同时使用
7.适当使用低通滤波和NOTCH FILTER
自: 麥克瘋
最后修改:
2014/6/9 9:32:21
14-06-04 16:23
1楼
编辑
引用
管理
@Q
好东西大家分享。
14-06-04 16:31
2楼
编辑
引用
管理
weixiu123
学习了 谢谢
14-06-04 16:42
3楼
编辑
引用
管理
920966915
看不懂 谁讲讲啊
14-06-04 20:11
4楼
编辑
引用
管理
wanghao389131
很好的资料'就是有些看不懂'要是有讲解就更好了'先收藏,留着以后备用
14-06-04 21:45
5楼
编辑
引用
管理
ZHTOK
普及了相关知识,好。
14-06-05 09:23
6楼
编辑
引用
管理
凤凰息梧桐
谢谢楼主 这个对我很有用啊
14-06-05 10:30
7楼
编辑
引用
管理
你本非你
好贴 谢谢楼主
14-06-05 13:00
8楼
编辑
引用
管理
songyuxi
好东西,谢谢楼主
14-06-05 13:08
9楼
编辑
引用
管理
weixiu123
收藏了谢谢
14-06-05 13:16
上一页
下一页
工控新闻
大湾区工博会2024新设工业软件、低空经济主题展,11月26-29日开幕
华北工控PPC-3317QP工控电脑,赋能生产线监控数智化
台达与汉钟精机签署合作协议 共建产线-物流仓储协同项目
世界级绿色石化产业集群数字化转型推进大会暨中控石化化工大模型首发仪式在甬成功举办
英伟达入局人形机器人,与特斯拉联手
西门子总裁:将捍卫在华市场份额
茵梦达成都分公司办公室盛大开业,开启新篇章!
BIS-6920P:基于车载控制应用,助力实现公交车智能调度
更多新闻资讯