登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:【话题】快速搞定伺服控制环(20140606)
点击:4557 回复:31
楼主
编辑
引用
管理
mikezym
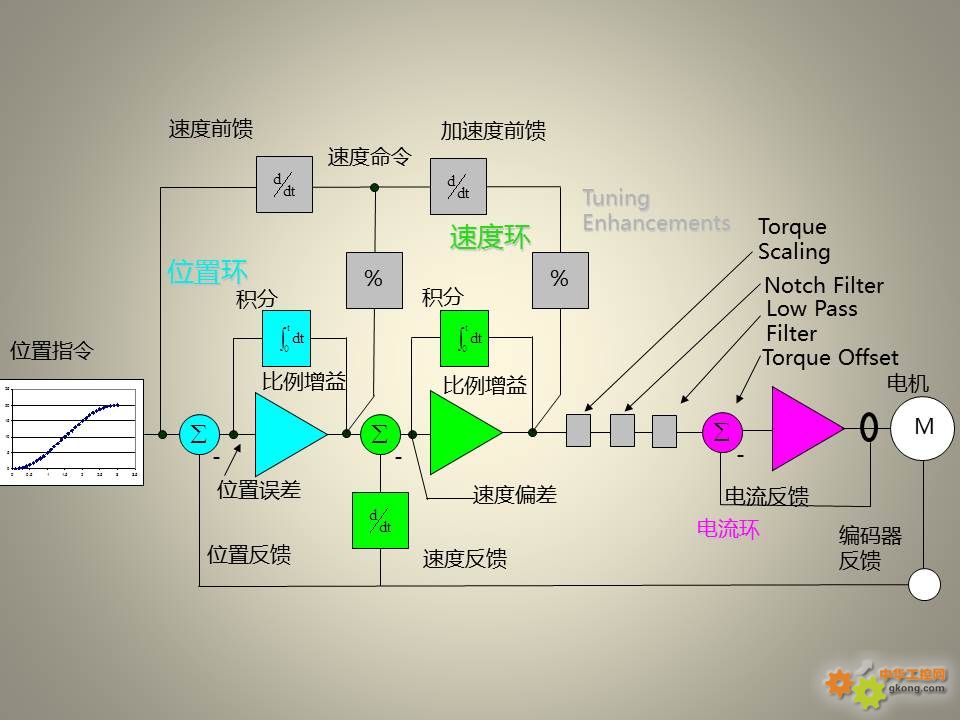
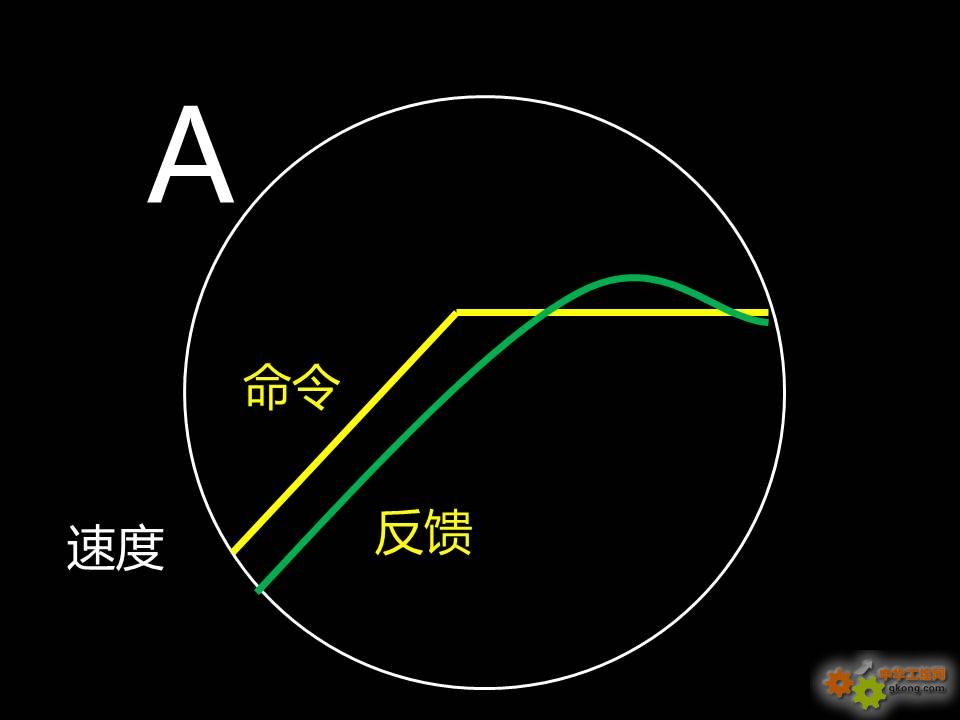
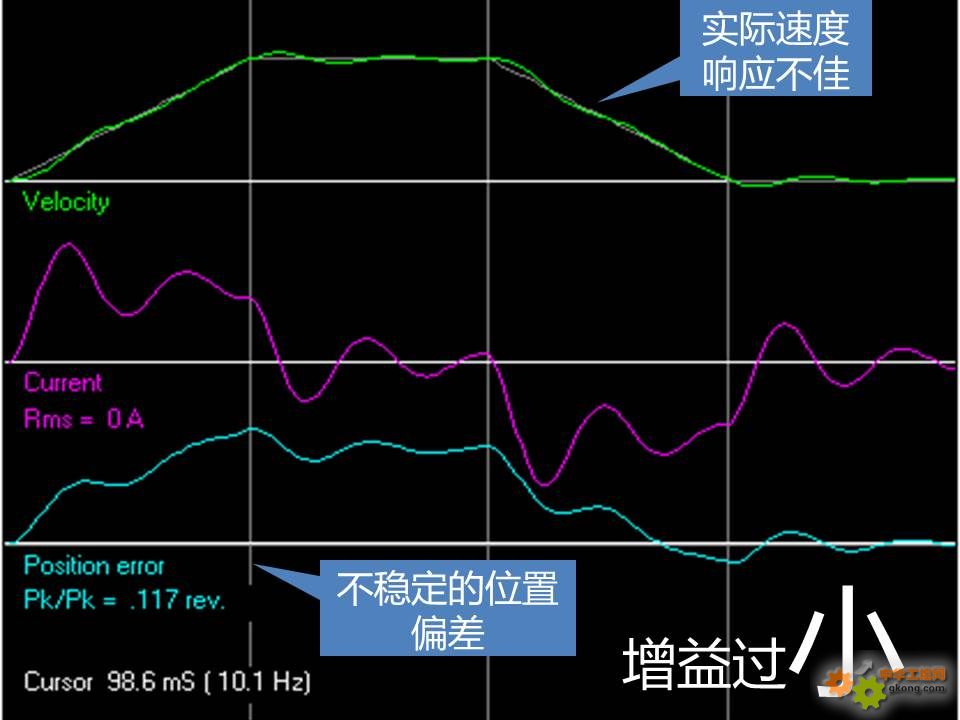
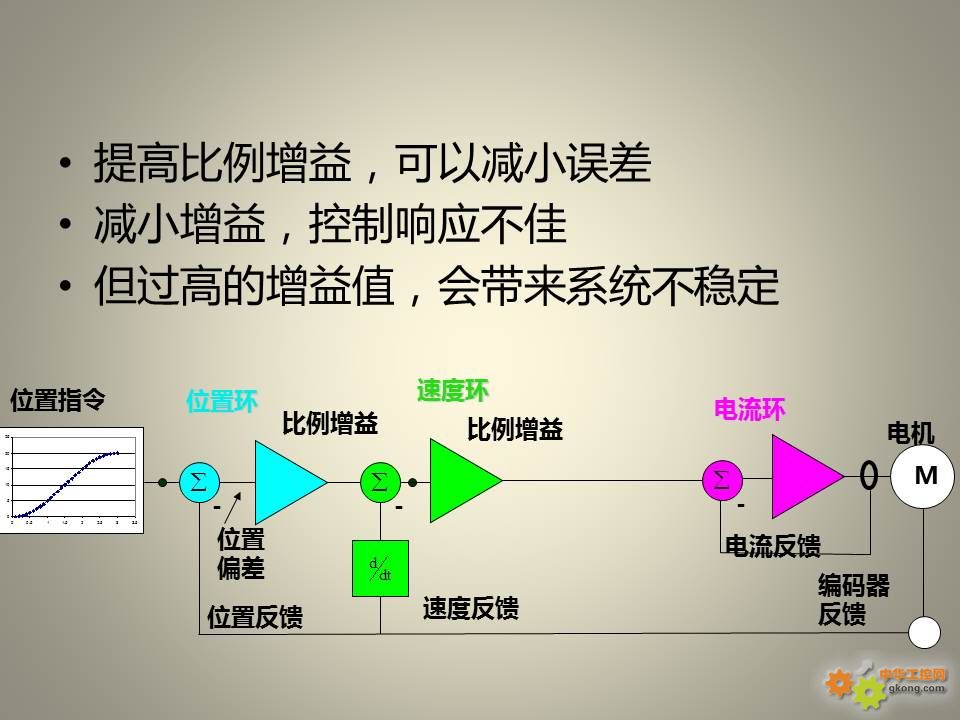
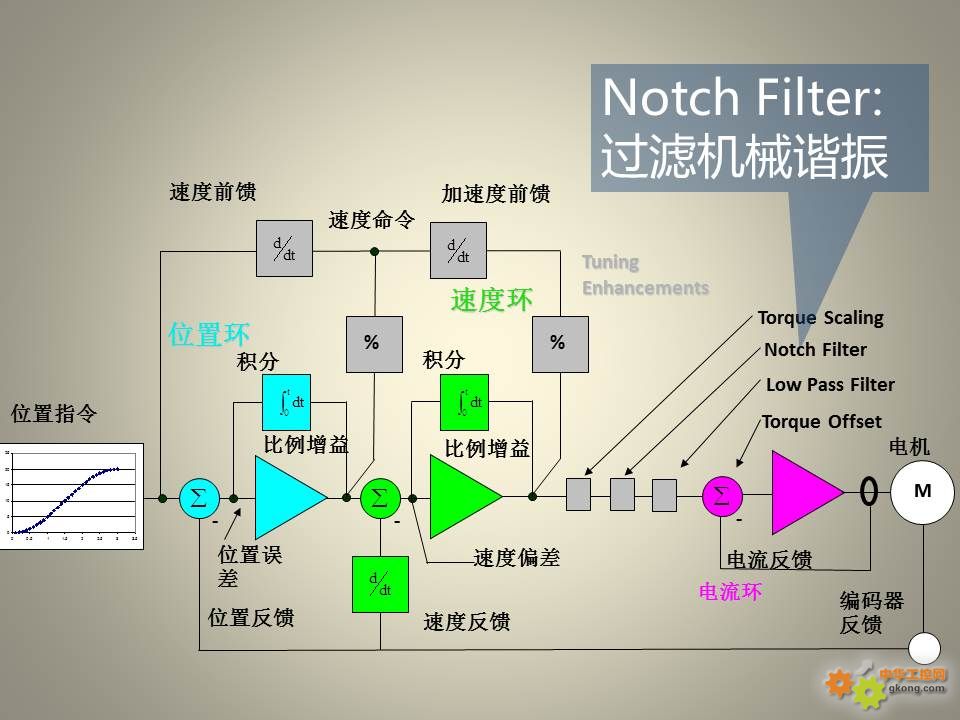
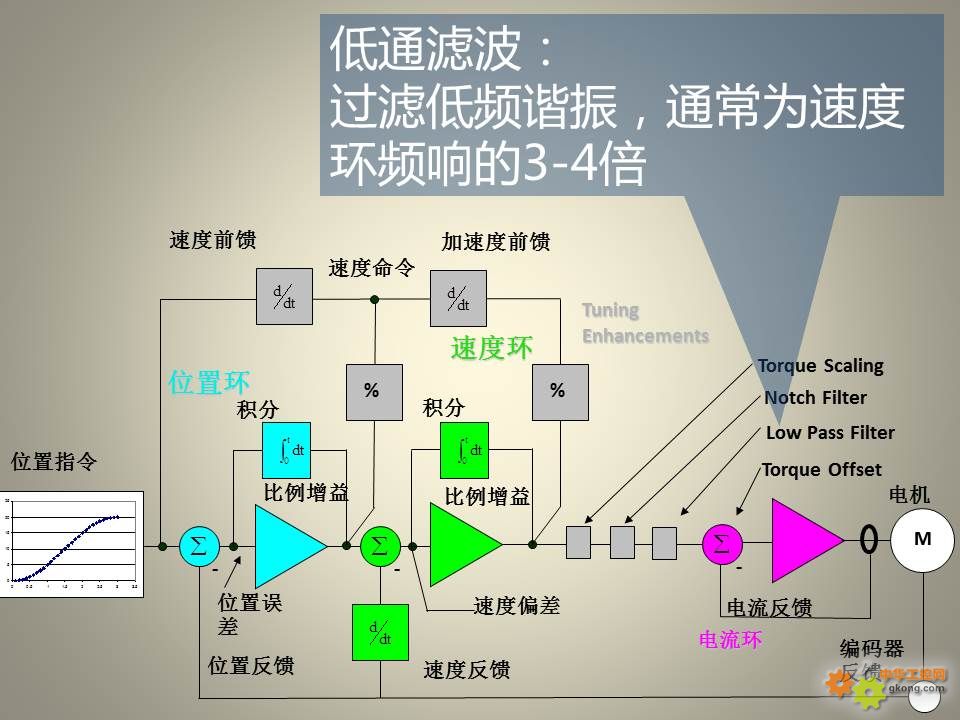
1.调整速度环增益,减小速度偏差
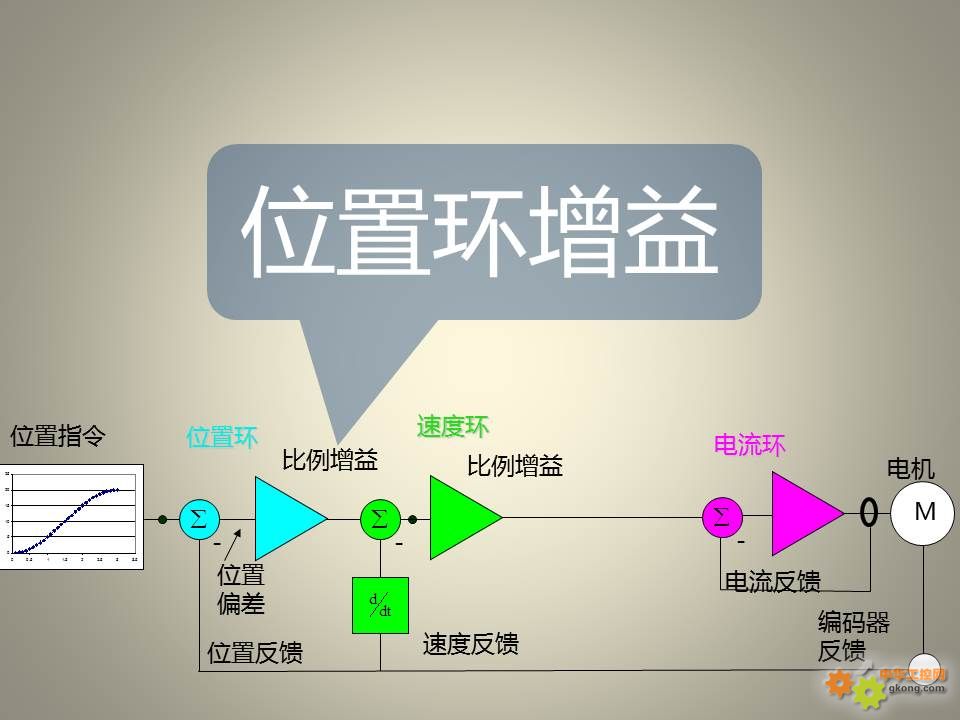
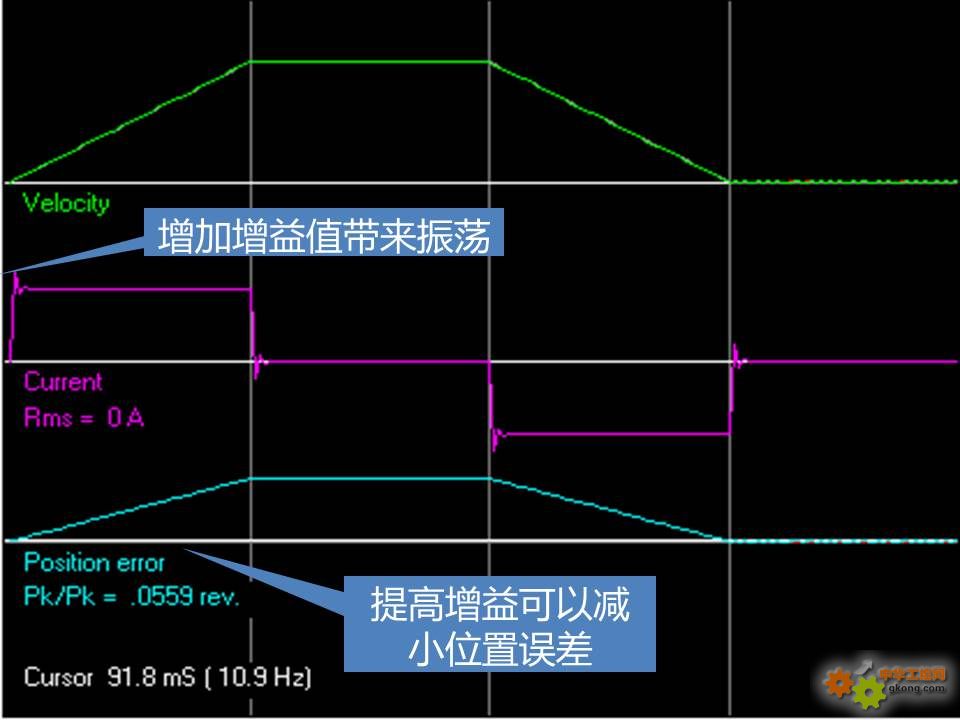
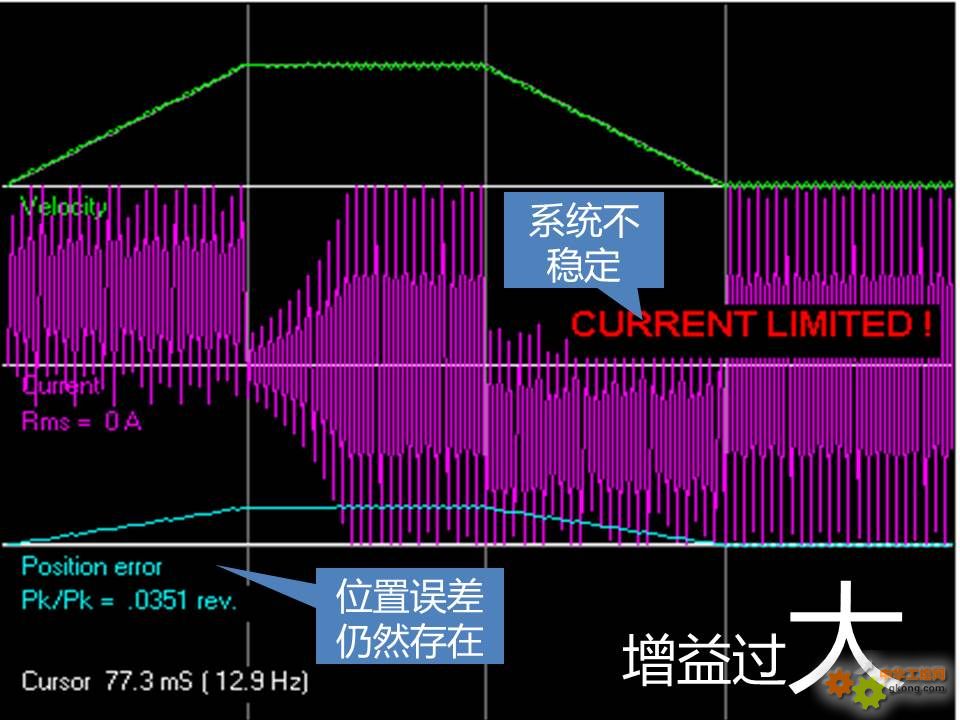
2.调整位置环增益,减小位置误差
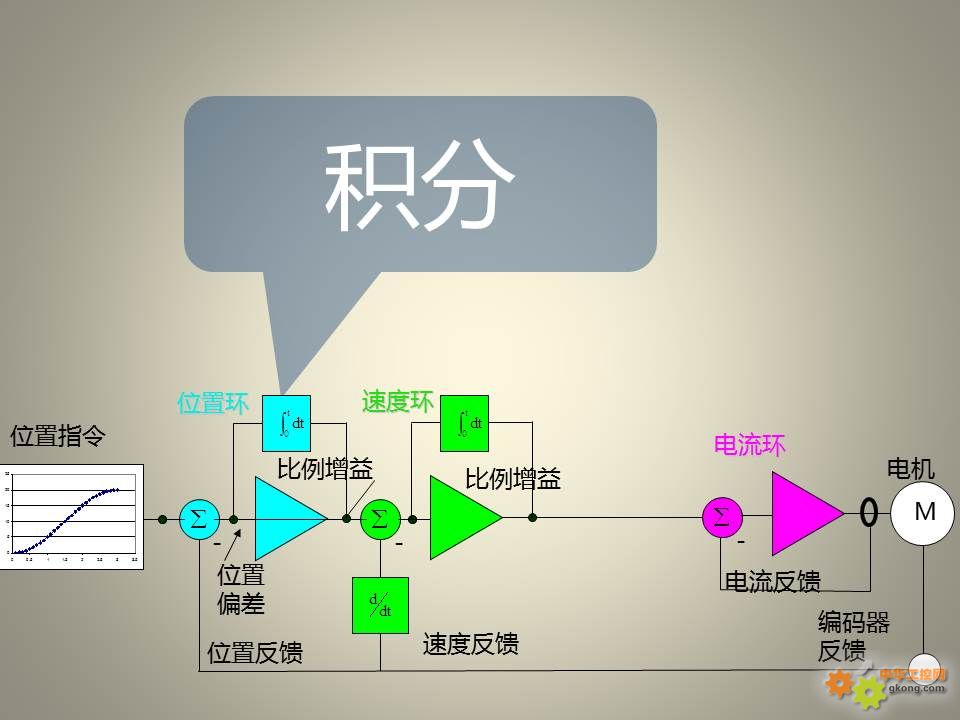
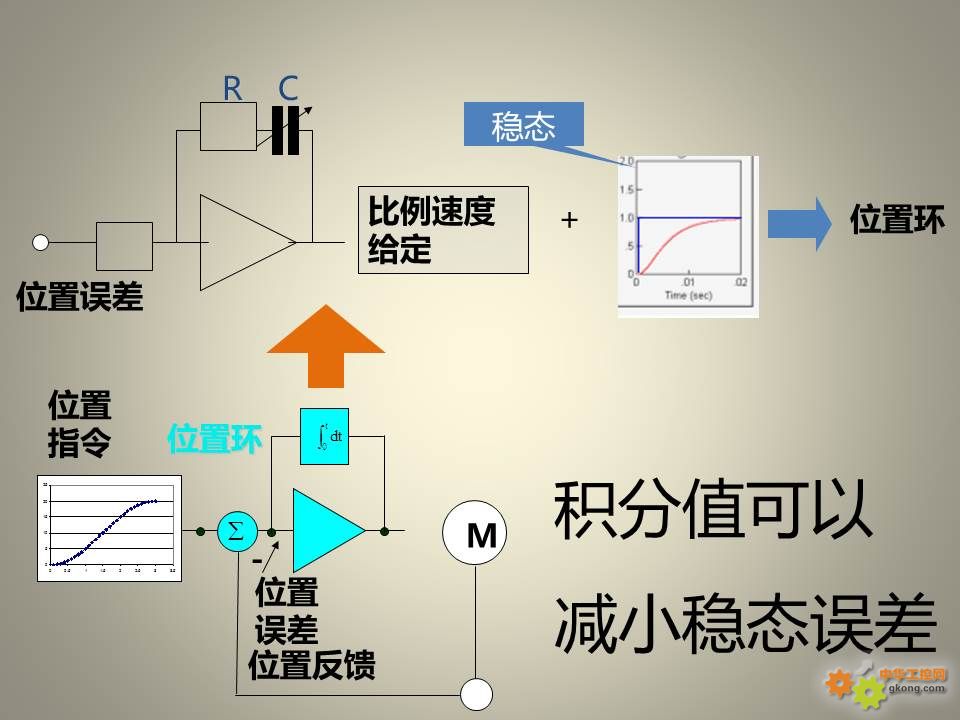
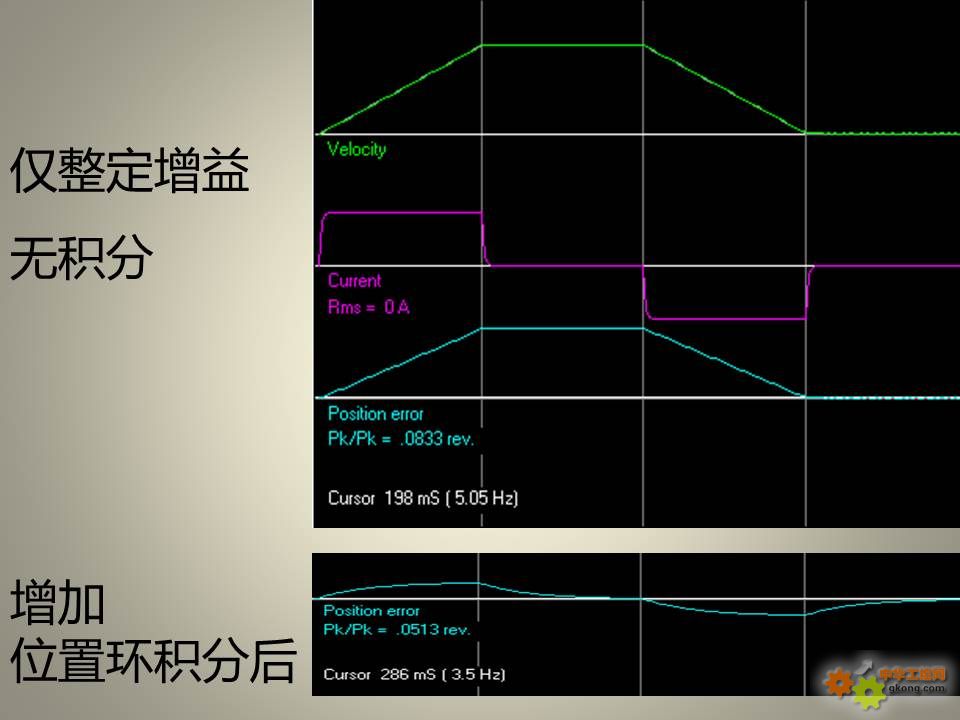
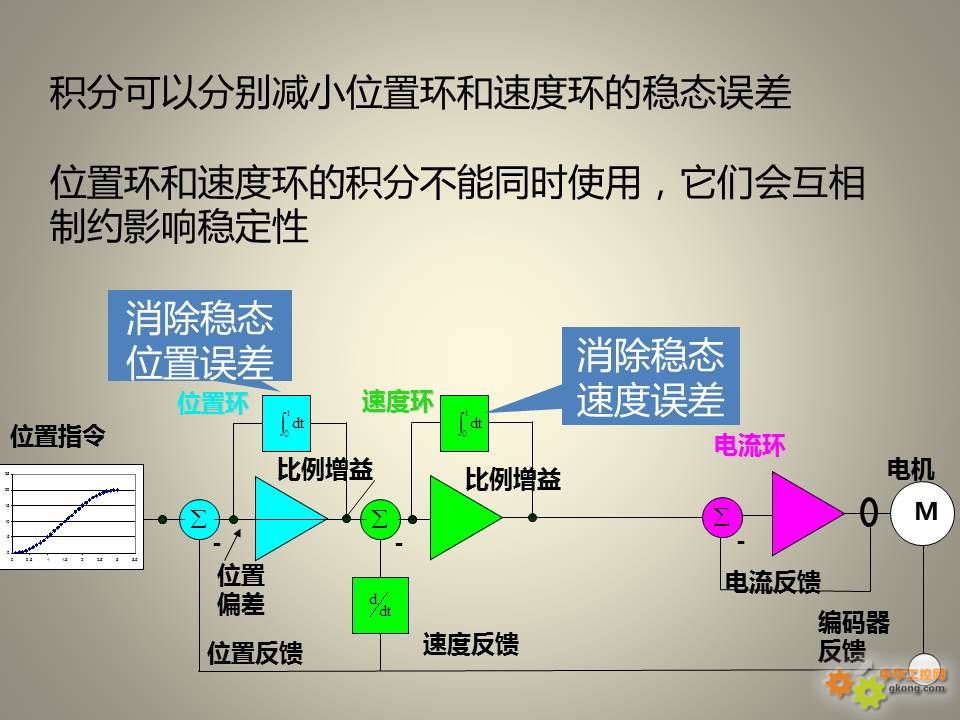
3.要进一步减小稳态误差,使用积分
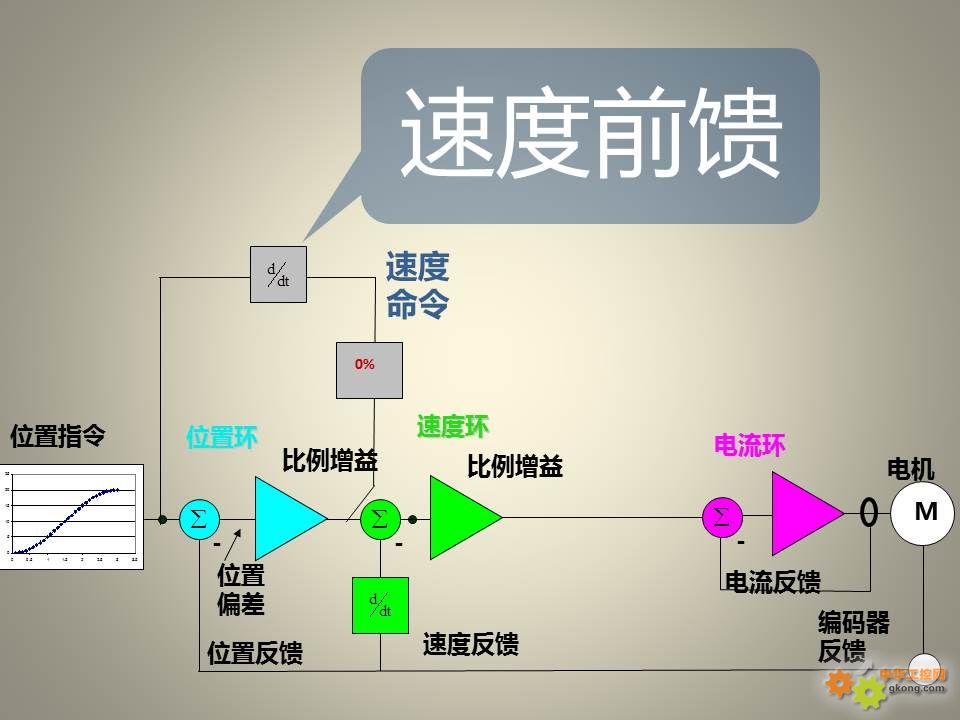
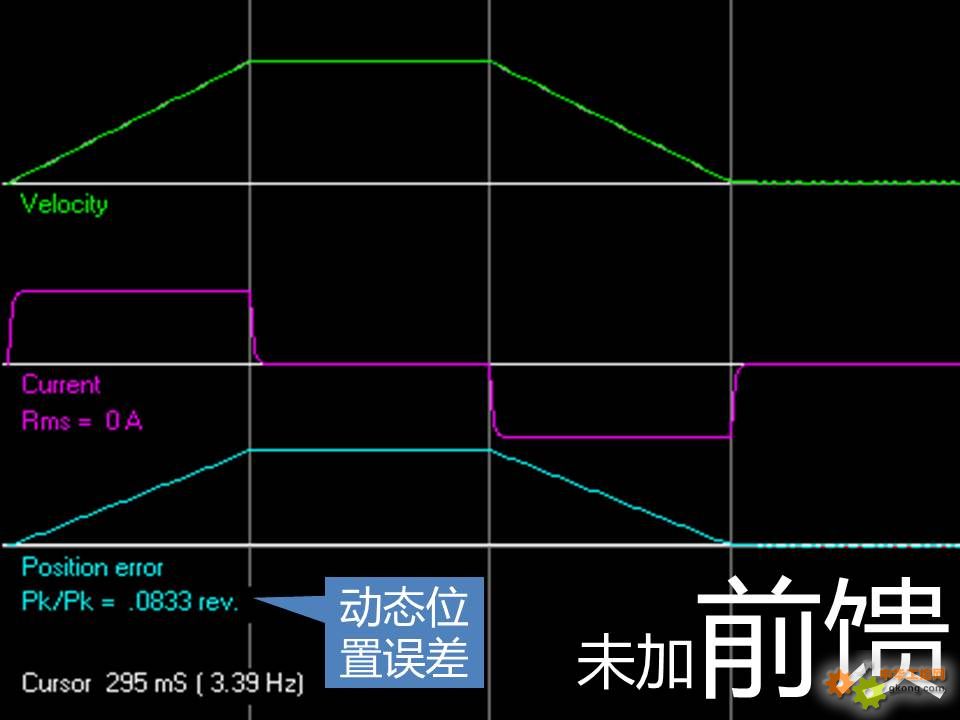
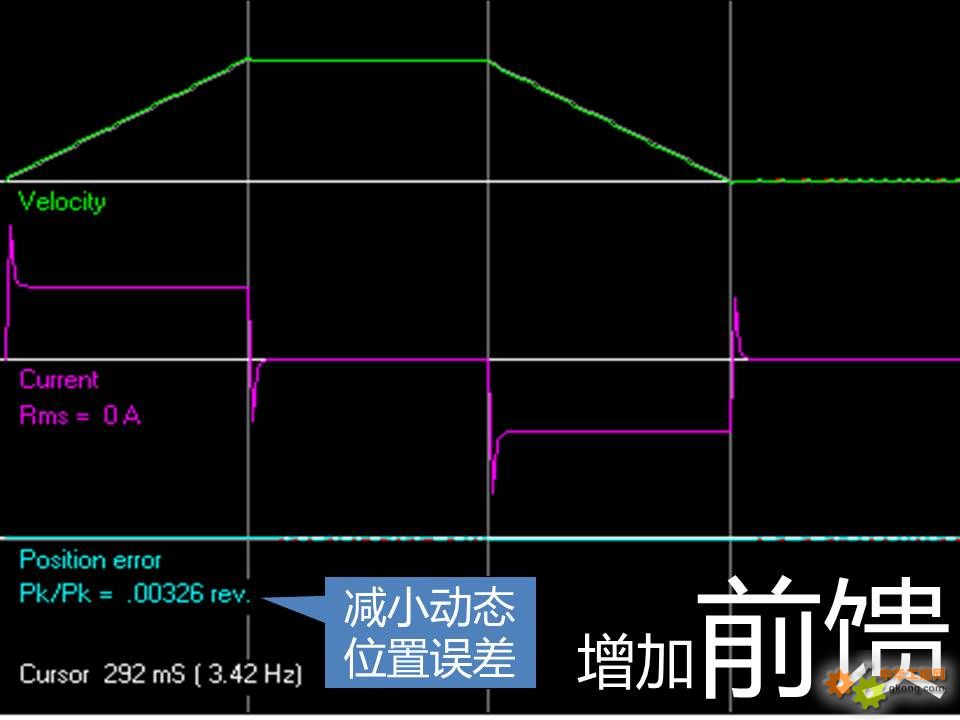
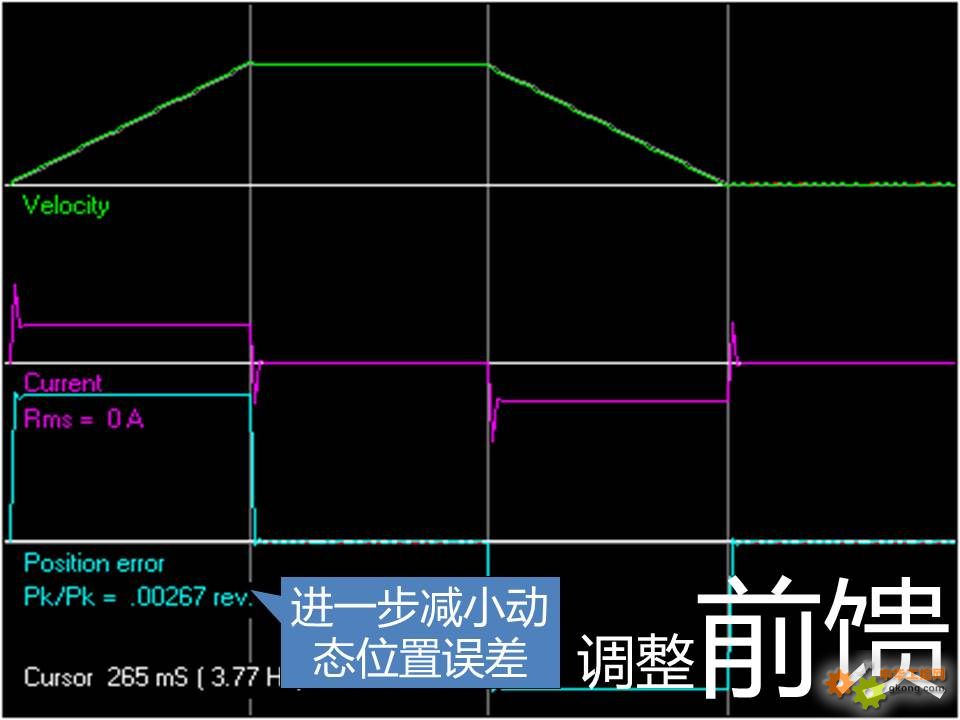
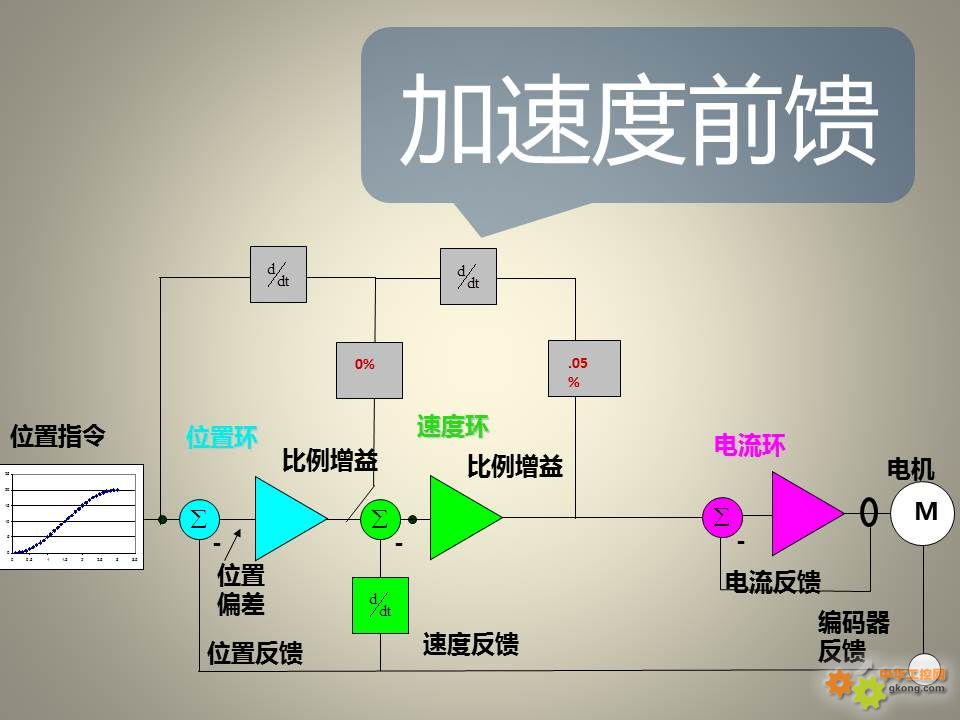
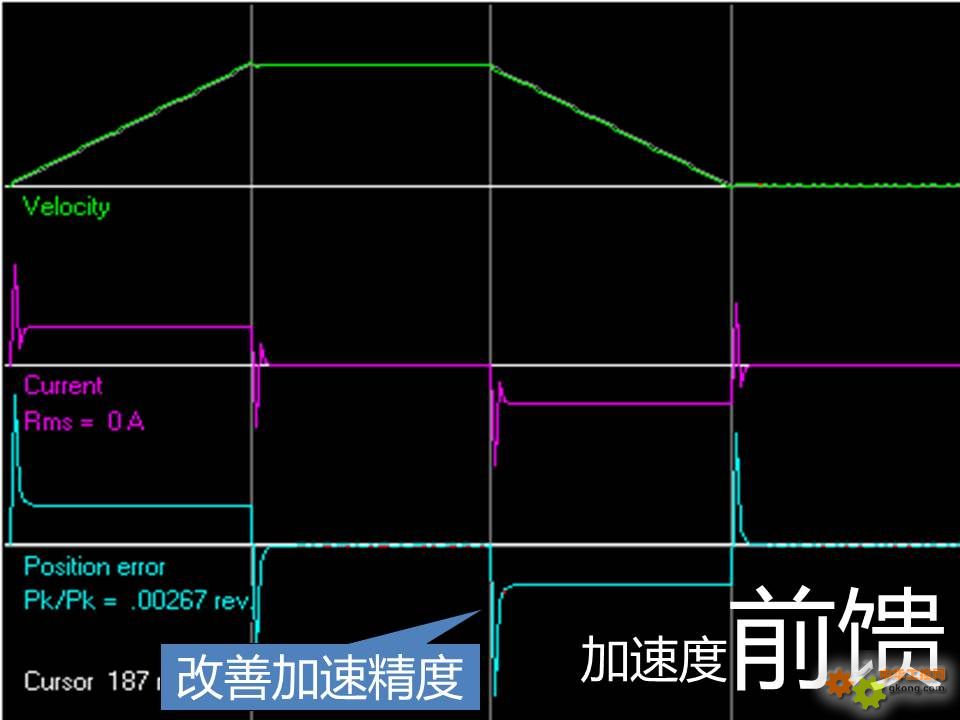
4.要进一步减小动态误差,使用前馈
5.前馈和积分不同时使用
6.速度环和位置环积分不同时使用
7.适当使用低通滤波和NOTCH FILTER
自: 麥克瘋
最后修改:
2014/6/9 9:32:21
14-06-04 16:23
1楼
编辑
引用
管理
@Q
好东西大家分享。
14-06-04 16:31
2楼
编辑
引用
管理
weixiu123
学习了 谢谢
14-06-04 16:42
3楼
编辑
引用
管理
920966915
看不懂 谁讲讲啊
14-06-04 20:11
4楼
编辑
引用
管理
wanghao389131
很好的资料'就是有些看不懂'要是有讲解就更好了'先收藏,留着以后备用
14-06-04 21:45
5楼
编辑
引用
管理
ZHTOK
普及了相关知识,好。
14-06-05 09:23
6楼
编辑
引用
管理
凤凰息梧桐
谢谢楼主 这个对我很有用啊
14-06-05 10:30
7楼
编辑
引用
管理
你本非你
好贴 谢谢楼主
14-06-05 13:00
8楼
编辑
引用
管理
songyuxi
好东西,谢谢楼主
14-06-05 13:08
9楼
编辑
引用
管理
weixiu123
收藏了谢谢
14-06-05 13:16
上一页
下一页
工控新闻
艾默生电气如何用153亿美元撼动工业软件市场?
皮尔磁:25年深耕,机械安全领域的风向标
施耐德电气:共建微网新业态,共赢绿色新质力
西门子总裁:将捍卫在华市场份额
双11特惠狂欢|多款FLIR红外热像仪限时抢购,尽享超值折扣!
建立保持制造业合理比重投入机制
中共中央 国务院关于深化产业工人队伍建设改革的意见
工业和信息化部宣传思想文化工作座谈会在京召开
更多新闻资讯