

老劉 撒的大謊 就是將PLC輸出脈衝數當成輸出頻率
你犯了一個可笑的錯誤 劉至斌=雄性(公) 公豬=雄性 劉至斌=公豬
A.“电机速度×编码器的解析度”得到反馈脉冲的频率;脈衝/分(劉至斌)
B.电机速度×编码器的解析度(劉至斌) =(公豬) PLC计数器计数脉冲的额定频率 X 电子齿轮比(脈衝/秒)
C.雄性=脈衝數
D.正確的說法 PLC輸出脈衝數=編碼器回饋的脈衝數 此脈衝數背後的物理意義 就是距離(脈衝數 X 脈衝當量)
E.那給的圖面就是高解析度之伺服流程圖 編碼器是絕對式(也就是阿Q說的偽絕對式) 你可以看XP給你的說明 這裡跟計數器一點關係都沒有 這就是你被阿Q罵你是學生的原因 你真的不懂編碼器
F.PLC那你就更不懂 PLC只輸出賣衝(下達移動距離命令) 編碼器回饋訊號跟PLC完全沒交集 這就是你的笑話 劉至斌=公豬
G.在速度型的控制 那編碼器的訊號是要回到控制器 這就有頻寬的限制 在這裡就可透過電子齒輪
H.另外 你可能不知編碼器也有頻寬的限制 多數編碼器輸出頻寬100KHz-200KHz I.轉速的要求就是看你做的項目 來選定編碼器的解析度 如用在高速主軸 那用低的解析度 用在分度才會選高解析度
J.高解析度之伺服其追求運動過程的平順度 征兄弟 也給你答案 我跟他不認識 但說法完全相同
K.結論
專業是很現實 懂就是懂 不懂你再怎麼狡辯 很容易被拆穿 我到客戶那裏從不拿型錄 規格書 就可以幫人上課 介紹運動控制 介紹伺服 線纜 編碼器 這可不是你紙上推演 看看幾本書就可得到
你犯了一個可笑的錯誤 劉至斌=雄性(公) 公豬=雄性 劉至斌=公豬
A.“电机速度×编码器的解析度”得到反馈脉冲的频率;脈衝/分(劉至斌)
B.电机速度×编码器的解析度(劉至斌) =(公豬) PLC计数器计数脉冲的额定频率 X 电子齿轮比(脈衝/秒)
C.雄性=脈衝數
D.正確的說法 PLC輸出脈衝數=編碼器回饋的脈衝數 此脈衝數背後的物理意義 就是距離(脈衝數 X 脈衝當量)
E.那給的圖面就是高解析度之伺服流程圖 編碼器是絕對式(也就是阿Q說的偽絕對式) 你可以看XP給你的說明 這裡跟計數器一點關係都沒有 這就是你被阿Q罵你是學生的原因 你真的不懂編碼器
F.PLC那你就更不懂 PLC只輸出賣衝(下達移動距離命令) 編碼器回饋訊號跟PLC完全沒交集 這就是你的笑話 劉至斌=公豬
G.在速度型的控制 那編碼器的訊號是要回到控制器 這就有頻寬的限制 在這裡就可透過電子齒輪
H.另外 你可能不知編碼器也有頻寬的限制 多數編碼器輸出頻寬100KHz-200KHz I.轉速的要求就是看你做的項目 來選定編碼器的解析度 如用在高速主軸 那用低的解析度 用在分度才會選高解析度
J.高解析度之伺服其追求運動過程的平順度 征兄弟 也給你答案 我跟他不認識 但說法完全相同
K.結論
專業是很現實 懂就是懂 不懂你再怎麼狡辯 很容易被拆穿 我到客戶那裏從不拿型錄 規格書 就可以幫人上課 介紹運動控制 介紹伺服 線纜 編碼器 這可不是你紙上推演 看看幾本書就可得到
12-08-29 09:37

引用 笨鳥慢飛 的回复内容:
…… PLC只輸出賣衝(下達移動距離命令) 編碼器回饋訊號跟PLC完全沒交集 ……
--------------------------------------------------------------------------------
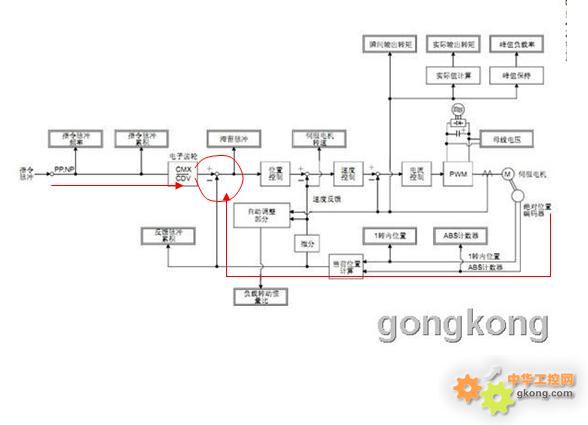
1、指令位移脉冲数(移動距離命令)和编码器的反馈脉冲在图中红线圈+ -,就是个计数的过程;
2、“編碼器回饋訊號跟PLC完全沒交集”是睁着眼说瞎话!
![附件]()
…… PLC只輸出賣衝(下達移動距離命令) 編碼器回饋訊號跟PLC完全沒交集 ……
--------------------------------------------------------------------------------
1、指令位移脉冲数(移動距離命令)和编码器的反馈脉冲在图中红线圈+ -,就是个计数的过程;
2、“編碼器回饋訊號跟PLC完全沒交集”是睁着眼说瞎话!
12-08-29 16:53
引用 笨鳥慢飛 的回复内容:
老劉 撒的大謊 就是將PLC輸出脈衝數當成輸出頻率……
--------------------------------------------------------------------------------
1、PLC输出什么脉冲?
2、这里只有两脉冲数,一个是运动前用户输入的位移指令脉冲数,一个是伺服运动中编码器的实时反馈脉冲;
3、就好像倒计时牌,距离奥运还有365天,这个365天就相当于用户输入的位移指令脉冲数,这个数是伺服运动前输入,是伺服运动中不变的一个数;
4、运动前用户输入的位移指令脉冲数,是在PLC计数器中设置的,这只是个数目,没有真实的脉冲发生!
5、有真实脉冲发生的就是伺服运动中编码器的实时反馈脉冲,这个脉冲要进入计数器的脉冲计数端,每发生一个脉冲,就减计数一次,直到365天减完到零,奥运会开始,这里就是伺服停车的位置!
6、计数器的计数额定频率,就是计数器接受计数脉冲的能力,编码器反馈脉冲频率太快时,计数器就来不及计数,就要出错;
7、这里没有笨鳥慢飛说的“PLC輸出脈衝數”!
8、那么我们在计算电子齿轮比的时候,笨鳥慢飛说的那个“选200KHZ PLC”,这个频率就是计数器的额定计数脉冲频率;
9、但是,我们经常把“200KHZ”说成是PLC发出脉冲的额定频率,这个说法是错误的,伺服运动期间PLC不发脉冲,计数器只接受编码器实时反馈脉冲;
10、纠正这个错误,正确的说法是“200HZ PLC”是PLC计数器计数脉冲的额定频率;
老劉 撒的大謊 就是將PLC輸出脈衝數當成輸出頻率……
--------------------------------------------------------------------------------
1、PLC输出什么脉冲?
2、这里只有两脉冲数,一个是运动前用户输入的位移指令脉冲数,一个是伺服运动中编码器的实时反馈脉冲;
3、就好像倒计时牌,距离奥运还有365天,这个365天就相当于用户输入的位移指令脉冲数,这个数是伺服运动前输入,是伺服运动中不变的一个数;
4、运动前用户输入的位移指令脉冲数,是在PLC计数器中设置的,这只是个数目,没有真实的脉冲发生!
5、有真实脉冲发生的就是伺服运动中编码器的实时反馈脉冲,这个脉冲要进入计数器的脉冲计数端,每发生一个脉冲,就减计数一次,直到365天减完到零,奥运会开始,这里就是伺服停车的位置!
6、计数器的计数额定频率,就是计数器接受计数脉冲的能力,编码器反馈脉冲频率太快时,计数器就来不及计数,就要出错;
7、这里没有笨鳥慢飛说的“PLC輸出脈衝數”!
8、那么我们在计算电子齿轮比的时候,笨鳥慢飛说的那个“选200KHZ PLC”,这个频率就是计数器的额定计数脉冲频率;
9、但是,我们经常把“200KHZ”说成是PLC发出脉冲的额定频率,这个说法是错误的,伺服运动期间PLC不发脉冲,计数器只接受编码器实时反馈脉冲;
10、纠正这个错误,正确的说法是“200HZ PLC”是PLC计数器计数脉冲的额定频率;
12-08-29 16:56
引用 笨鳥慢飛 的回复内容:
…… D.正確的說法 PLC輸出脈衝數=編碼器回饋的脈衝數 此脈衝數背後的物理意義 就是距離(脈衝數 X 脈衝當量) ……
--------------------------------------------------------------------------------
1、伺服运动前,用户设置的位移指令脉冲数,是PLC计数器的基数,是个死数字,就是距離(脈衝數 X 脈衝當量);
2、在伺服运动中,編碼器回饋的脈衝數是个实时增加的一个数,由零一增大到“PLC輸出脈衝數=編碼器回饋的脈衝數”,伺服停机!
3、“PLC輸出脈衝數”的说法改成“PLC计数器设定基数”或者“用户设定的位移指令脉冲数”!
…… D.正確的說法 PLC輸出脈衝數=編碼器回饋的脈衝數 此脈衝數背後的物理意義 就是距離(脈衝數 X 脈衝當量) ……
--------------------------------------------------------------------------------
1、伺服运动前,用户设置的位移指令脉冲数,是PLC计数器的基数,是个死数字,就是距離(脈衝數 X 脈衝當量);
2、在伺服运动中,編碼器回饋的脈衝數是个实时增加的一个数,由零一增大到“PLC輸出脈衝數=編碼器回饋的脈衝數”,伺服停机!
3、“PLC輸出脈衝數”的说法改成“PLC计数器设定基数”或者“用户设定的位移指令脉冲数”!
12-08-29 16:59
5、在途中,指令脉冲一路没有脉冲,指令脉冲数是在伺服启动前输入的;
6、PLC不输出脉冲,只是用户在其计数器中要输入指令脉冲数作为计数基数;
12-08-29 17:05
总结一下:
1、运动前用户输入的位移指令脉冲数,是个二进制数,它乘以脉冲当量就是距離(脈衝數 X 脈衝當量),就是PLC的计数器的基数;
2、PLC计数器的计数脉冲额定(最高)频率,例如笨鳥慢飛说的“选200KHZPLC”中的200KHZ,如果在额定情况下计数,200KHZ=周指令脉冲数×电机速度(单位转/秒);
3、编码器解析度,或者叫编码器周反馈脉冲数;
4、编码器反馈脉冲频率=编码器解析度×电机速度
5、电子齿轮比=编码器反馈脉冲频率/计数器计数脉冲额定频率
=编码器解析度×电机速度/周指令脉冲数×电机速度
=编码器周反馈脉冲数/周指令脉冲数
6、笨鳥慢飛 不承认有减计数这个过程;
7、如果没有减计数的过程,就没有加速、匀速、减速命令信号产生的依据;
8、就只剩下启动、停车命令,变成 “位移开关+PLC”控制模式了;
1、运动前用户输入的位移指令脉冲数,是个二进制数,它乘以脉冲当量就是距離(脈衝數 X 脈衝當量),就是PLC的计数器的基数;
2、PLC计数器的计数脉冲额定(最高)频率,例如笨鳥慢飛说的“选200KHZPLC”中的200KHZ,如果在额定情况下计数,200KHZ=周指令脉冲数×电机速度(单位转/秒);
3、编码器解析度,或者叫编码器周反馈脉冲数;
4、编码器反馈脉冲频率=编码器解析度×电机速度
5、电子齿轮比=编码器反馈脉冲频率/计数器计数脉冲额定频率
=编码器解析度×电机速度/周指令脉冲数×电机速度
=编码器周反馈脉冲数/周指令脉冲数
6、笨鳥慢飛 不承认有减计数这个过程;
7、如果没有减计数的过程,就没有加速、匀速、减速命令信号产生的依据;
8、就只剩下启动、停车命令,变成 “位移开关+PLC”控制模式了;
12-08-29 17:08
9、电子齿轮比=编码器反馈脉冲频率/计数器计数脉冲额定频率
=编码器解析度×电机速度/计数器计数脉冲额定频率
应该是电子齿轮的定义式定义式,用它做计算,大家就不会有很多糊涂的地方;
10、电子齿轮比=编码器周反馈脉冲数/周指令脉冲数 大家就糊涂很多,关系就彻底乱套了;
=编码器解析度×电机速度/计数器计数脉冲额定频率
应该是电子齿轮的定义式定义式,用它做计算,大家就不会有很多糊涂的地方;
10、电子齿轮比=编码器周反馈脉冲数/周指令脉冲数 大家就糊涂很多,关系就彻底乱套了;
最后修改:2012/8/29 17:17:10
12-08-29 17:16
引用 笨鳥慢飛 的回复内容:
…… 專業是很現實 懂就是懂 不懂你再怎麼狡辯 很容易被拆穿 我到客戶那裏從不拿型錄 規格書 就可以幫人上課 介紹運動控制 介紹伺服 線纜 編碼器 這可不是你紙上推演 看看幾本書就可得到
--------------------------------------------------------------------------------
1、说实话,我原本以为笨鳥慢飛很專業,现在不这么看了;
2、笨鳥慢飛專業技术,就好像大家会开电视、会选台、会调声音大小……所具有的一样的伺服专业技术;
3、笨鳥慢飛对伺服的原理根本一窍不通,公式推导、物理概念一概没有,气急败坏的样子令人恶心!
…… 專業是很現實 懂就是懂 不懂你再怎麼狡辯 很容易被拆穿 我到客戶那裏從不拿型錄 規格書 就可以幫人上課 介紹運動控制 介紹伺服 線纜 編碼器 這可不是你紙上推演 看看幾本書就可得到
--------------------------------------------------------------------------------
1、说实话,我原本以为笨鳥慢飛很專業,现在不这么看了;
2、笨鳥慢飛專業技术,就好像大家会开电视、会选台、会调声音大小……所具有的一样的伺服专业技术;
3、笨鳥慢飛对伺服的原理根本一窍不通,公式推导、物理概念一概没有,气急败坏的样子令人恶心!
12-08-29 17:25
引用 笨鳥慢飛 的回复内容:
…… PLC只輸出賣衝(下達移動距離命令) 編碼器回饋訊號跟PLC完全沒交集 ……
--------------------------------------------------------------------------------
1、指令位移脉冲数(移動距離命令)和编码器的反馈脉冲在图中红线圈+ -,就是个计数的过程;
2、“編碼器回饋訊號跟PLC完全沒交集”是睁着眼说瞎话!
------------------------------
A>你的圖內 告訴我計數器在哪裡 再問計數器做甚麼用的 是一個硬件 還是個軟件功能
B> 若依你1所講的圖中圈紅線 就是計數器 就算計數器(你說的) 能否告訴我他是放在PLC 還是放在驅動器
C> 若是在驅動器 那你2的結論 代表你在說謊
D>若是在PLC 那電子齒輪的功能 也是在PLC內 那你所有講的電子齒輪就全部是騙人
…… PLC只輸出賣衝(下達移動距離命令) 編碼器回饋訊號跟PLC完全沒交集 ……
--------------------------------------------------------------------------------
1、指令位移脉冲数(移動距離命令)和编码器的反馈脉冲在图中红线圈+ -,就是个计数的过程;
2、“編碼器回饋訊號跟PLC完全沒交集”是睁着眼说瞎话!
------------------------------
A>你的圖內 告訴我計數器在哪裡 再問計數器做甚麼用的 是一個硬件 還是個軟件功能
B> 若依你1所講的圖中圈紅線 就是計數器 就算計數器(你說的) 能否告訴我他是放在PLC 還是放在驅動器
C> 若是在驅動器 那你2的結論 代表你在說謊
D>若是在PLC 那電子齒輪的功能 也是在PLC內 那你所有講的電子齒輪就全部是騙人
12-08-30 09:50