登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:【正运动技术】6099报错6090031h问题处理
点击:39 回复:0
楼主
编辑
引用
管理
运动控制小正
6099报错6090031h问题
可能原因:
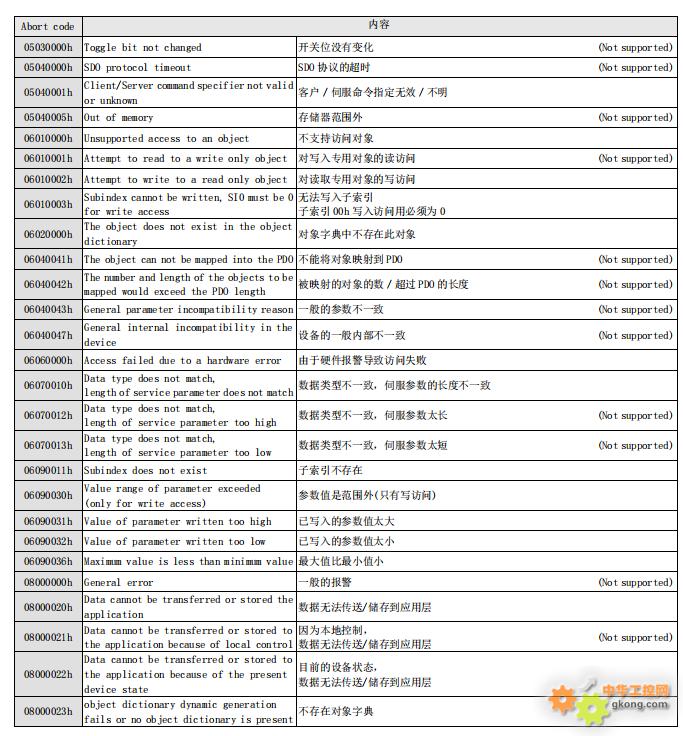
报6090031是参数值太高,问题在于驱动器那边的单位是圈,而控制器给的速度是乘上脉冲当量的,这导致控制器这边传输过去的速度值报6090031h。6099是驱动器回零速度。
解决方案:
回零前将脉冲当量修改为1在启动驱动器回零就能解决了。
排查方法:
402协议错误码:写入数据异常。
25-06-25 16:25
工控新闻
我国工业母机营收超1.5万亿元,下阶段主战场在哪里?
卧龙电驱赴港上市加推出海战略 全球设5大研发中心海外收入近40%
破局人形机器人制造瓶颈!2025人形机器人先进制造技术论坛在株洲隆重举办
华北工控EMB-3128:支持Intel® Alder Lake-N系列处理器的3.5寸板
莱迪思与三菱电机合作带来新一代工业自动化体验
前5个月融资额232亿元 超去年全年!京东美团等大厂“疯投”机器人
伊顿收购北美固态变压器品牌RPS,技术版图再扩张
2025开放原子开源生态大会在京开幕
更多新闻资讯