登录
首页
运动控制
运动控制
回帖
发帖
正文
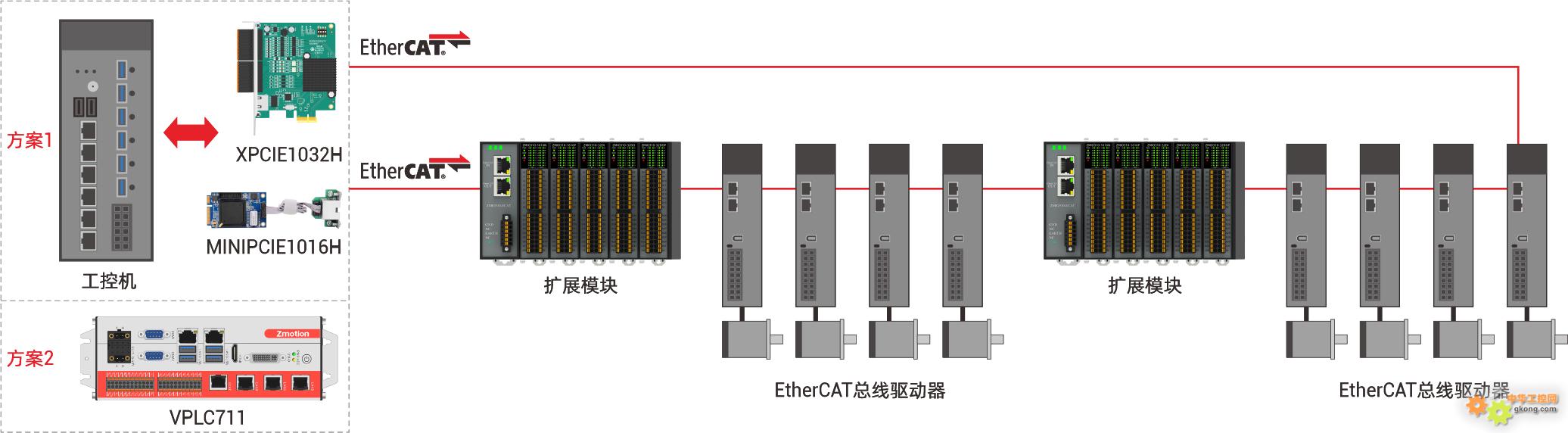
主题:【正运动技术】环形冗余架构实现原理
点击:55 回复:0
楼主
编辑
引用
管理
运动控制小正
通过将末端从站的EtherCAT OUT端口回连至主站,构建物理环形通讯链路。当线性链路中任意从站发生故障时,系统将快速自动切换至另一路径,确保非故障从站持续保持正常EtherCAT通信,可显著提升系统可靠性与运行稳定性。
针对连续生产场景对设备24/7不间断运行的要求,冗余机制实现EtherCAT通讯的更可靠和更稳定,可有效杜绝非计划停产导致的产能损失。
25-06-11 15:24
工控新闻
我国工业母机营收超1.5万亿元,下阶段主战场在哪里?
卧龙电驱赴港上市加推出海战略 全球设5大研发中心海外收入近40%
破局人形机器人制造瓶颈!2025人形机器人先进制造技术论坛在株洲隆重举办
华北工控EMB-3128:支持Intel® Alder Lake-N系列处理器的3.5寸板
莱迪思与三菱电机合作带来新一代工业自动化体验
前5个月融资额232亿元 超去年全年!京东美团等大厂“疯投”机器人
伊顿收购北美固态变压器品牌RPS,技术版图再扩张
2025开放原子开源生态大会在京开幕
更多新闻资讯