
同步跟随过程分为三部分:加速追赶、同步加工、结束归位。
(1)加速追赶:动作机构加速追上产品位置,并保持追赶末端速度与产品速度一致的过程。
(2)同步加工:动作机构加速追赶上之后,继续保持与产品同样的速度运动的过程,即两者相对静止的过程;加工动作常在此过程中进行。
(3)结束归位:加工完成后,打断跟随过程,回归待机位的过程。
正运动技术提供了成熟的同步跟随执行指令MOVESYNC完成上述过程。
2.同步指令
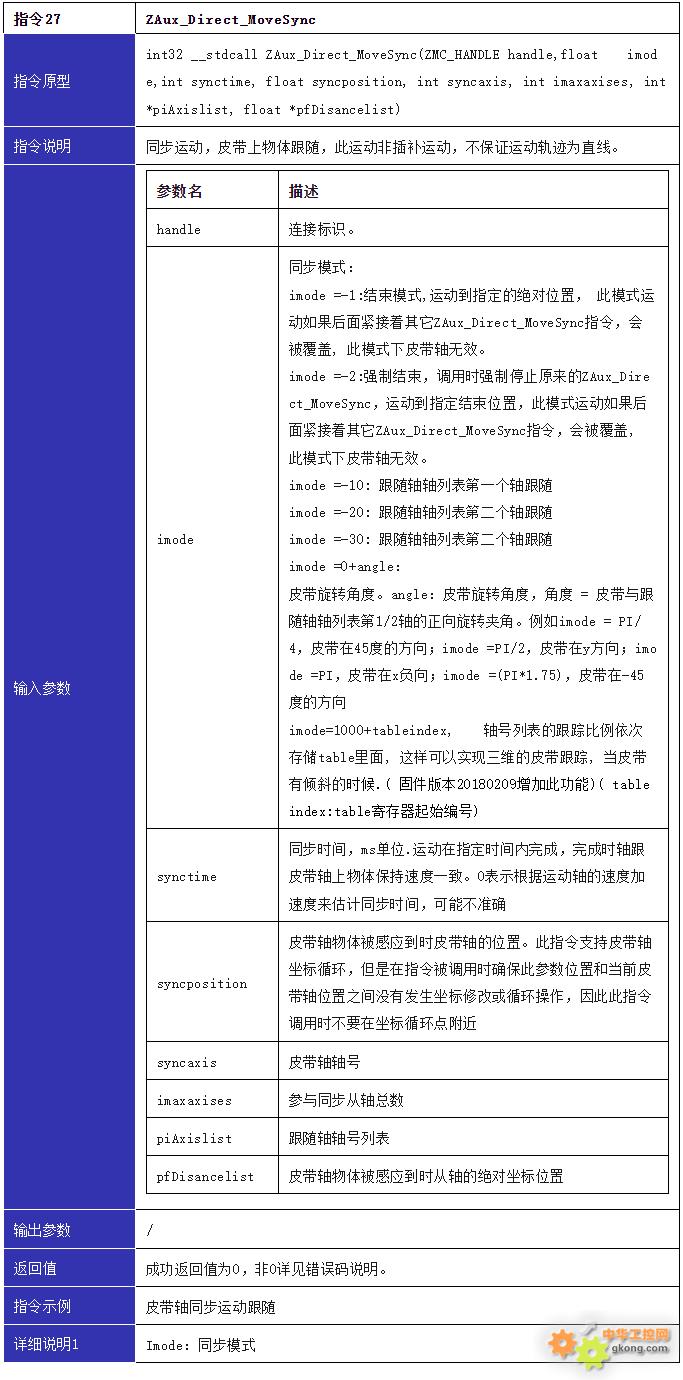
MOVESYNC -- 同步运动,皮带上物体跟随
语法:
MOVESYNC(mode,synctime,syncposition,syncaxis,pos1[,pos2, pos3…])
参数解释:
(1)mode:mode=0 + angle,angle:皮带旋转角度,角度=皮带轴dpos正向与BASE轴正向的夹角。使用时需要将角度转换为弧度(0~2PI)。
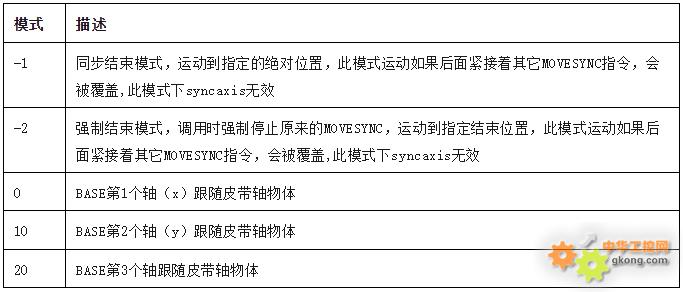
(3)syncposition:皮带轴物体被感应到时皮带轴的位置。
(4)syncaxis:皮带轴轴号,-1表示没有皮带轴。
(5)pos1:皮带轴物体被感应到时的BASE第1个轴绝对位置。
(6)posn:皮带轴物体被感应到时的BASE第n个轴绝对位置。
上位机指令参数排列一样。
最后修改:2025/6/4 15:55:20