登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:【正运动技术】回零模式详解(五)
点击:68 回复:0
楼主
编辑
引用
管理
运动控制小正
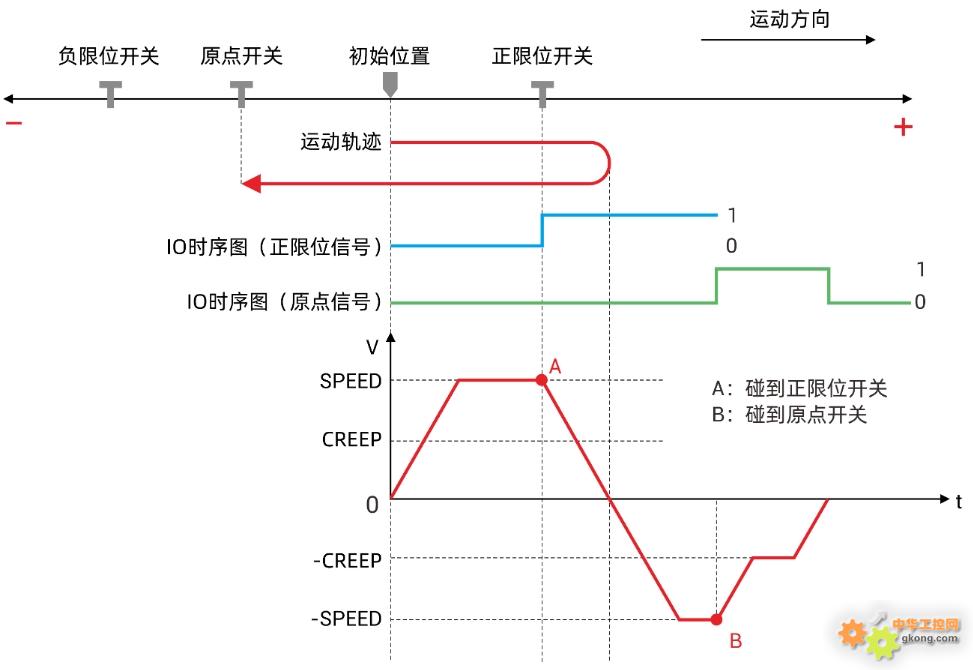
回零模式13:
mode=13
(注:mode为指令中的参数,具体指令介绍可看往期主题帖)
轴先以SPEED正向运行,若碰到限位开关,不会报警停止,以SPEED反向运动,碰到原点开关后减速为CREEP直至离开原点开关立即停止,回零成功,位置清零。若先碰到原点信号,则与模式3相同。
更多详情内容请点击→“
正运动技术官网
”查看。
25-04-15 11:45
工控新闻
皮尔磁:创新的传感器技术打造高效自动化
上市十年首现巨亏后 埃斯顿寻求“A+H”股上市
工信部将推动大模型在制造业重点行业落地
手机厂商纷纷布局机器人业务
震撼!工业 3.0时代,被魏德米勒这波「技术狂飙」操作帅到了
强强联手!华沿机器人与基恩士共同赋能工业检测升级
重新定义性价比!兆易创新GD32C231系列MCU强势推出
展会直击 | 虹科亮相华南工博会,创新赋能工业智造!
更多新闻资讯