DATUM是运动控制器的回零指令,需根据当前轴所处的位置或效率要求选择合适的模式,DATUM指令执行后轴开始运动,搜寻原点信号,遇到原点信号后自行停止,将当前的位置清零,回零成功。
语法:DATUM (mode),DATUM(21,mode2)
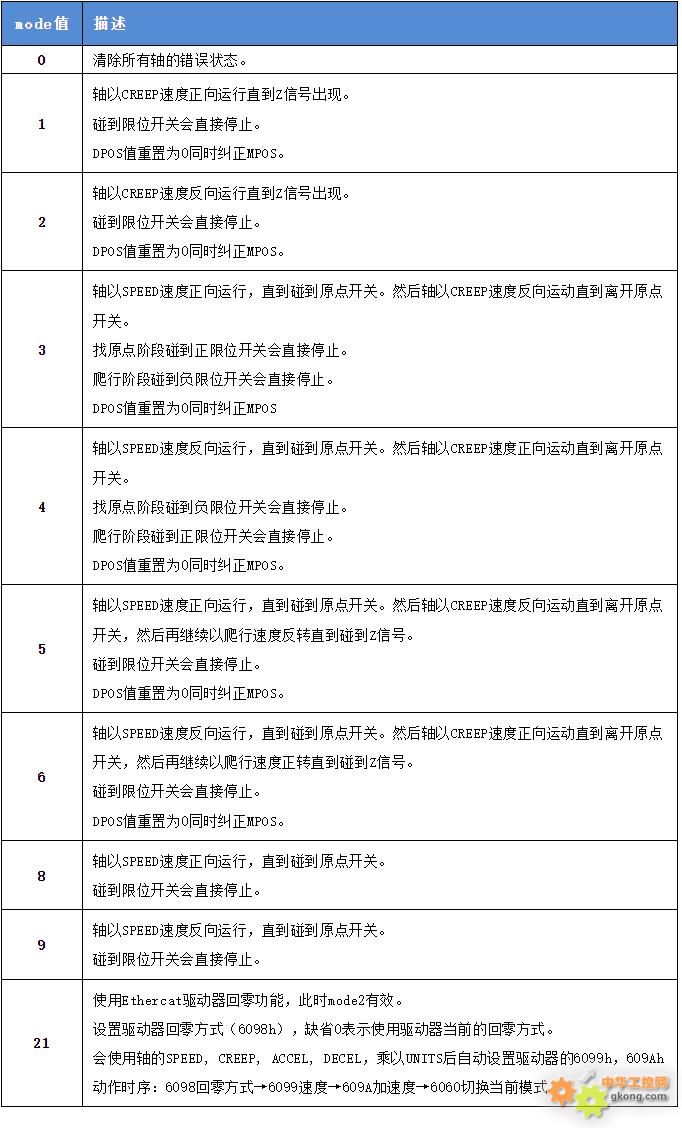
mode:找原点模式。
mode值+10(10+n)表示碰到限位后反找,不会碰到限位停止,例如DATUM(13)=DATUM(3+10),用于正限位反向回零,多用于原点在正中间的情况。
mode值+100(100+n),表示模式n回零成功之后,自动清零MPOS,适用于ATYPE=4,接入编码器后可以自动清零MPOS(仅限特定系列控制器)。如DATUM(103)、DATUM(104)。
mode值+110(100+10+n),表示模式10+n回零成功之后,自动清零MPOS,适用于ATYPE=4,接入编码器后可以自动清零MPOS(仅限特定系列控制器)。如DATUM(113)、DATUM(114)。
mode2:mode=21时有效,缺省0,非0时设置到驱动器回零方式,根据驱动器手册数据字典6098h设置值。