
PT(Position-Time)运动:是一种单位时间内的运动位置控制技术,主要用于控制步进电机和伺服电机等运动设备在设定时间内实现精确的轴位置控制。位置跟时间参数一般是PC每个周期计算好对应的坐标,然后传给控制器。
PT算法:在用户定义的“位置和时间”点之间,PT算法计算出一个合适的速度曲线。PT算法保证控制卡的轨迹计算符合每一个已知的点和时间。分段速度简单的由位置和时间的差分计算出来。
PT运动适用场景:适用于近距离的点位运动或低速度的运动。它是非常简单的算法,需要很少的计算量,因此计算速度很快。在低性能的运动系统中很受欢迎。但如果点之间间隔太大,那么运动将会很粗糙,因为每一段的加速度将会显得不连续。
PT运动为保证设定的单位时间内达到规划的目标位置,控制器自动生成相应的加速度、速度曲线规划。如果在极短时间内运动大距离,脉冲频率会过高,导致电机堵转。建议分解成小段,重复发送,连续的多个周期PT运动时, 速度会自动均匀。
2.PVT运动介绍
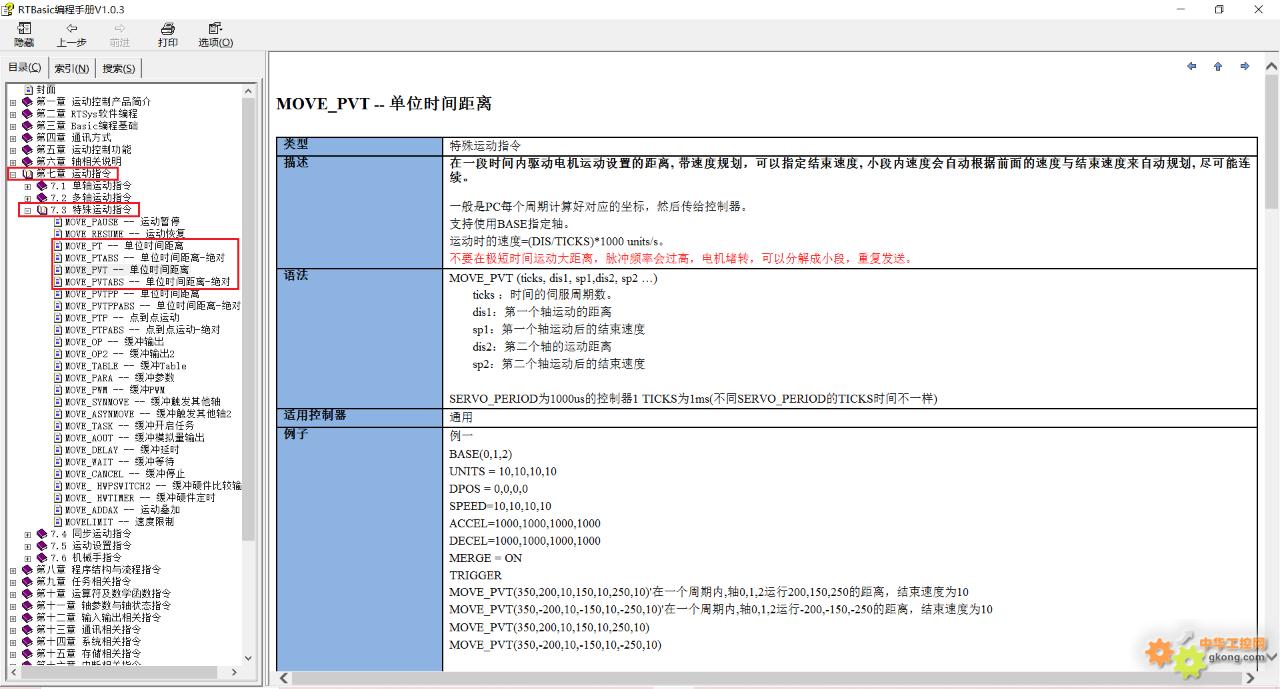
PVT(Position-Velocity-Time)运动:是一种基于位置、速度和时间的综合控制方法,通过协调这三个方面的参数,实现对运动系统的精准控制。PVT在一段时间内驱动电机运动设置的距离,可以指定结束速度,小段内速度会自动根据前面的速度与结束速度来自动规划,尽可能连续。位置、速度跟时间参数一般是PC每个周期计算好对应的坐标,然后传给控制器。
PVT算法:在用户定义的“位置/速度/时间”点之间,PVT算法计算出合适的Jerk参数(加加速度,非恒定加速度)。这个算法保证轨迹计算合符每个已知点的位置、速度和时间。
PVT模式算法适用场景:PVT算法对于平滑轨迹和轨迹跟踪非常有效。位置轨迹点可以间隔很近,也可以间隔很大。比如说对于复杂的路径,点位需要间隔很近;对于简单的路径,点位可以间隔很大。PVT可以手动指定点位置,但是要确定好每个点的合适速度值。
3.正运动的PT指令与PVT指令
相关的指令说明可以打开RTSys软件,点击软件右上角的【帮助文档】,选择RTBasic编程手册,在第七章的7.3节特殊运动指令章节进行查看。
最后修改:2025/2/11 10:47:15