
PN版本伺服系统只有速度控制模式和位置控制模式,不支持数字量输入端子的速度控制、模拟量输入端子速度控制。
PLC与SINAMICS V90伺服驱动系统通信实现了速度控制,减少了硬接线控制信号线,这种方案越来越多被工程实践采用。
S7-1200通过PROFINET现场总线与SINAMICS V90伺服驱动系统通信实现速度控制有三种方案,分别是:
(1)使用标准报文和工艺对象(TO),对SINAMICS V90伺服驱动系统实现速度控制。这种方法与TO位置控制类似。
(2)S7-1200通过I/O地址控制SINAMICS V90伺服驱动系统实现速度控制。
(3)S7-1200通过FB285 函数块块控制SINAMICS V90伺服驱动系统实现速度控制。
首先介绍S7-1200 PLC通过I/O地址控制SINAMICS V90伺服驱动系统实现速度控制。
用一台HMI和CPU 1211C/CPU 1511-1 PN对SINAMICS V90伺服驱动系统通过PROFINET进行无级调速和正、反转控制。要求设计解决方案,并编写控制程序。
1.软硬件配置
1)1套TIA Portal V18。
2)1套SINAMICS V90 PN伺服驱动系统。
3)1台CPU 1211C/CPU 1511-1 PN。
以CPU 1211C为控制器的原理图如图1所示,以CPU 1511-1 PN为控制器的原理图如图2所示,CPU 1211C的PN接口(X1P1)与SINAMICS V90伺服驱动器PN接口(X150)之间用专用的以太网屏蔽电缆连接。网线为直通线,即正连接。CPU 1511-1 PN的PN口是P1口或P2口均可。
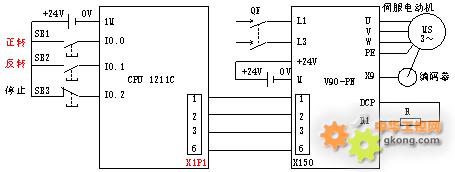
图1 例1以CPU 1211C为控制器的原理图
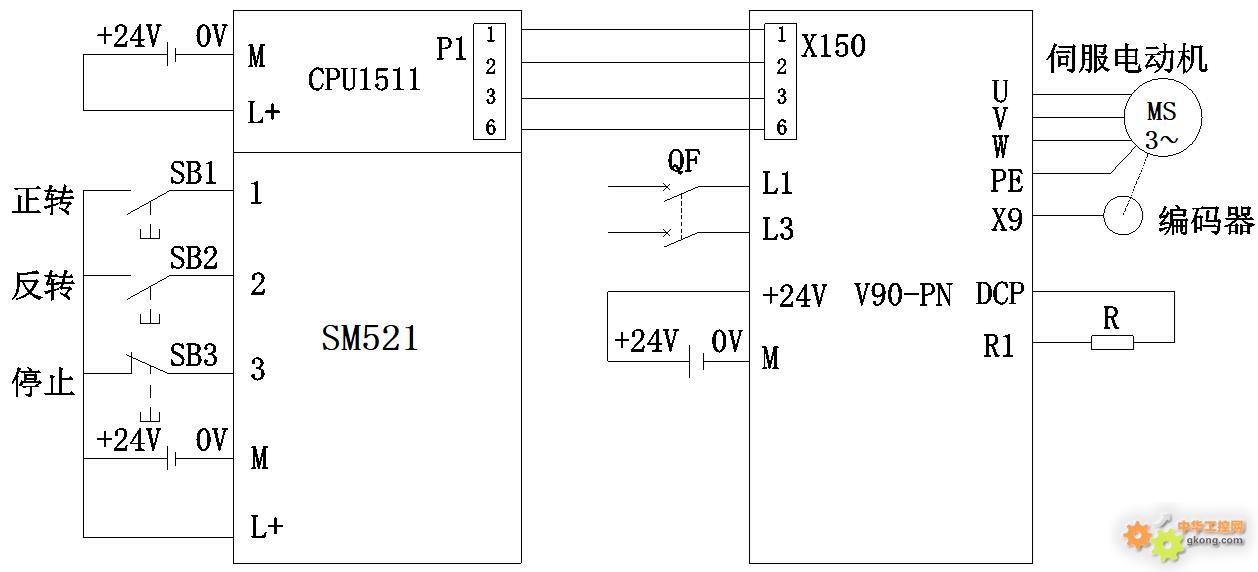
图2 例1以CPU 1511-1 PN为控制器的原理图
2.硬件组态
(1)新建项目“PN_1211C”,如图3所示,在项目树中单击“设备”→“PN_1211C”→“设备和网络”→“设备视图”,在硬件目录中,单击“CPU”→“CPU 1211C AC/DC/Rly”→“6ES7 211 -1BE40-0XB0”,并将其拖拽到“设备视图”界面中相应的位置。
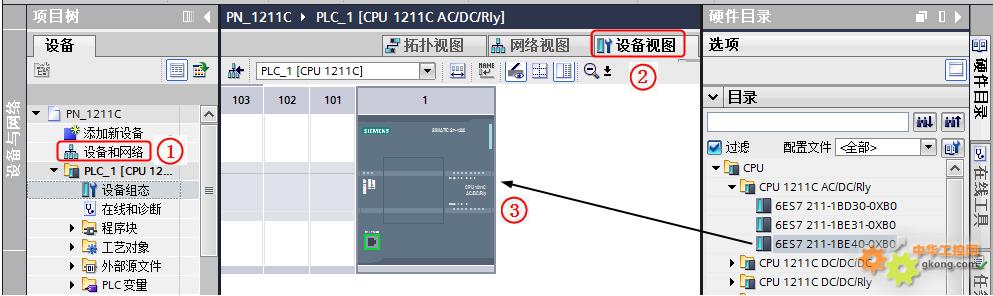
图3 新建项目
(2)配置PROFINET接口。在“设备视图”界面中选中“CPU1211C”的图标,打开“属性”选项卡,单击“常规”→“PROFINET接口[X1]”→“以太网地址”,单击“添加新子网”按钮,新建PROFINET网络,如图4所示。
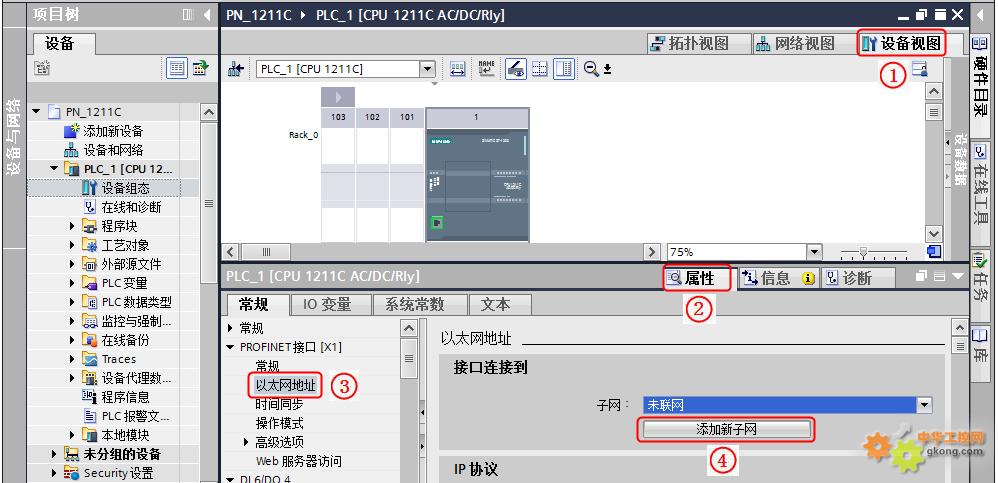
图4 配置PROFINET接口
(3)安装GSD文件。一般TIA Portal软件中没有安装GSD文件时,无法组态SINAMICS V90伺服驱动器,因此在组态伺服驱动器之前,需要安装GSD文件(若已安装了GSD文件,则忽略此步骤)。
(4)配置SINAMICS V90伺服驱动器。展开右侧的硬件目录,选中“其他现场设备”→“PROFINET IO”→“Drives”→“SIEMENS AG”→“SINAMICS”→“SINAMICS V90…”,拖拽“SINAMICS V90”到“网络视图”界面中相应的位置,如图5所示。在图6中,单击“网络视图”界面中PLC_1 CPU 1211C模块的绿色标记(PLC的PROFINET接口)处并按照鼠标左键不放,拖拽到SINAMICS V90模块的绿色标记(SINAMICS V90的PROFINET接口)处,松开鼠标左键。
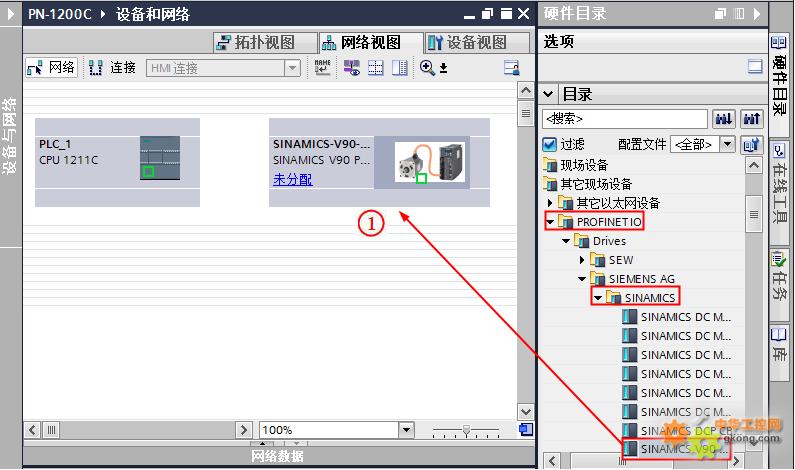
图5 配置SINAMICS V90伺服驱动器(1)
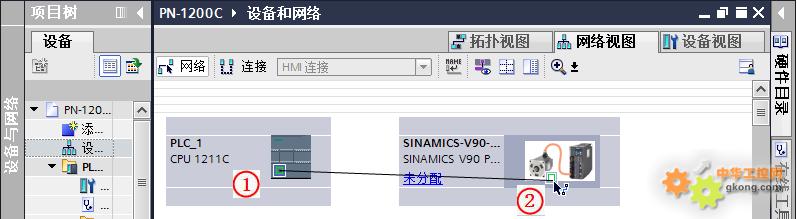
图6 配置SINAMICS V90伺服驱动器(2)
(5)配置通信报文。选择并双击SINAMICS V90模块,切换到SINAMICS V90的设备视图,单击硬件目录中的“子模块”(Submodules)→“标准报文1,PZD2/2”(Standard telegram 1 PZD2/2),并拖拽到如图7所示位置。
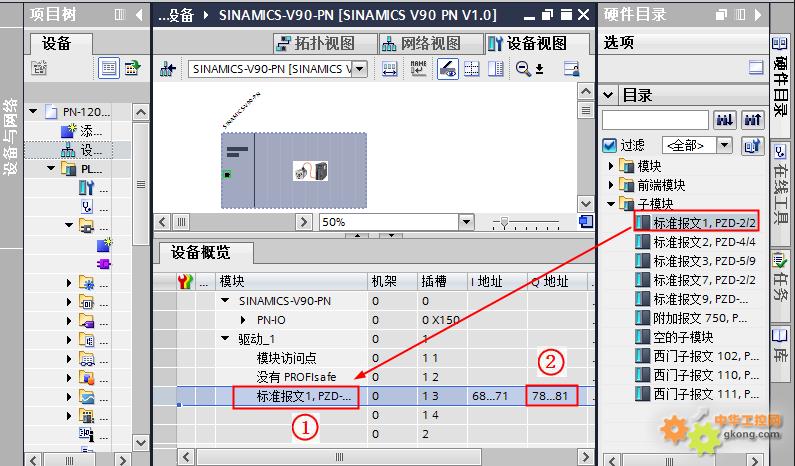
图7 配置通信报文
注意:PLC侧选择标准报文1,那么伺服驱动器侧也要选择报文1。标准报文1的控制字是QW78,主设定值是QW80。这里“78…81”代表QB78~QB81共4个字节,也就是QW78和QW80共2个字。
3.分配SINAMICS V90的名称和IP地址
在“设备视图”界面中选择SINAMICS V90模块,在“属性”选项卡中,单击“常规”→“PROFINET接口”,查看IP地址和PROFINET设备名称,如图8所示。
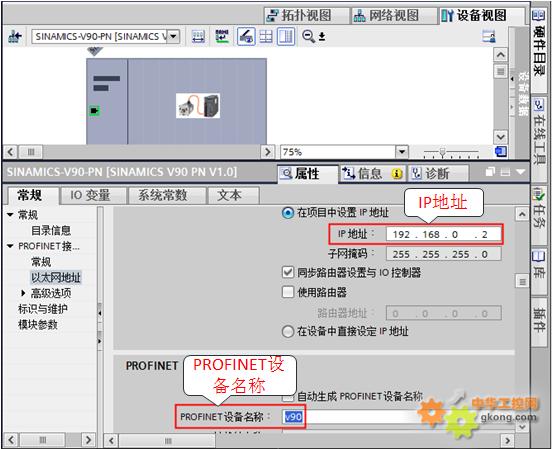
图8 组态SINAMICS V90的名称和IP地址
如果使用V-ASSISTANT软件调试,分配SINAMICS V90的名称和IP地址可以在V-ASSISTANT软件中进行,如图9所示,将PN站的IP地址和PN站名称修改成与TIA Portal软件中组态时(见图8)一致,单击“保存并激活”按钮,确保TIA Portal软件中组态时的SINAMICS V90的PROFINET设备名称和IP地址与实际一致。当然还可以使用TIA Portal软件、PRONETA软件分配SINAMICS V90的名称和IP地址。

图9 分配SINAMICS V90的名称和IP地址
分配伺服驱动器的名称和IP地址对于成功通信是至关重要的,初学者往往会忽略这一步,导致通信不成功。
再次强调:读者在调试PLC与G120/S120/V90通信时,若变频器的BF、LINK或者COM(总线故障)等为红色,或者PLC上的BF、ERROR灯为红色,应首先检查变频器的组态名称和IP地址与实际的是否一致,若不一致,则必须修改为一致。
4.设置SINAMICS V90的参数
设置SINAMICS V90的参数十分关键,否则通信是不能正确建立。SINAMICS V90参数见表1。
[CENTER]表1 SINAMICS V90参数

注意:本例的伺服驱动器设置的是标准报文[/CENTER]
1.与S7-1200 PLC组态时选用的报文是一致的(必须一致),否则可能不能建立通信。
5.编写程序
编写OB100中的初始化程序如图10所示。
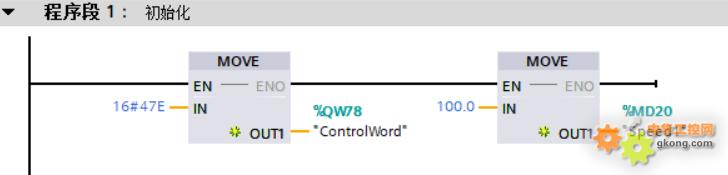
图10 OB100中的初始化程序
编写FC1控制程序如图11所示,程序段1的功能是设定转速,程序段2的功能是起停控制。
编写OB1中的主程序,如图12所示,程序解读如下:
程序段1:正转控制,当处于停机状态时,按下正转起动按钮,电动机正转。
程序段2:反转控制,当处于停机状态时,按下反转起动按钮,电动机反转。
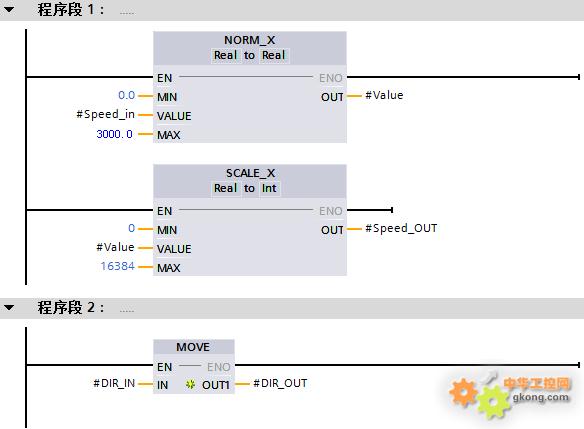
图11 OB100中的初始化程序
程序段3:停止控制,按下停止按钮,发出16#47E的停机命令,并且发出转速为0的设定值,电动机停机。
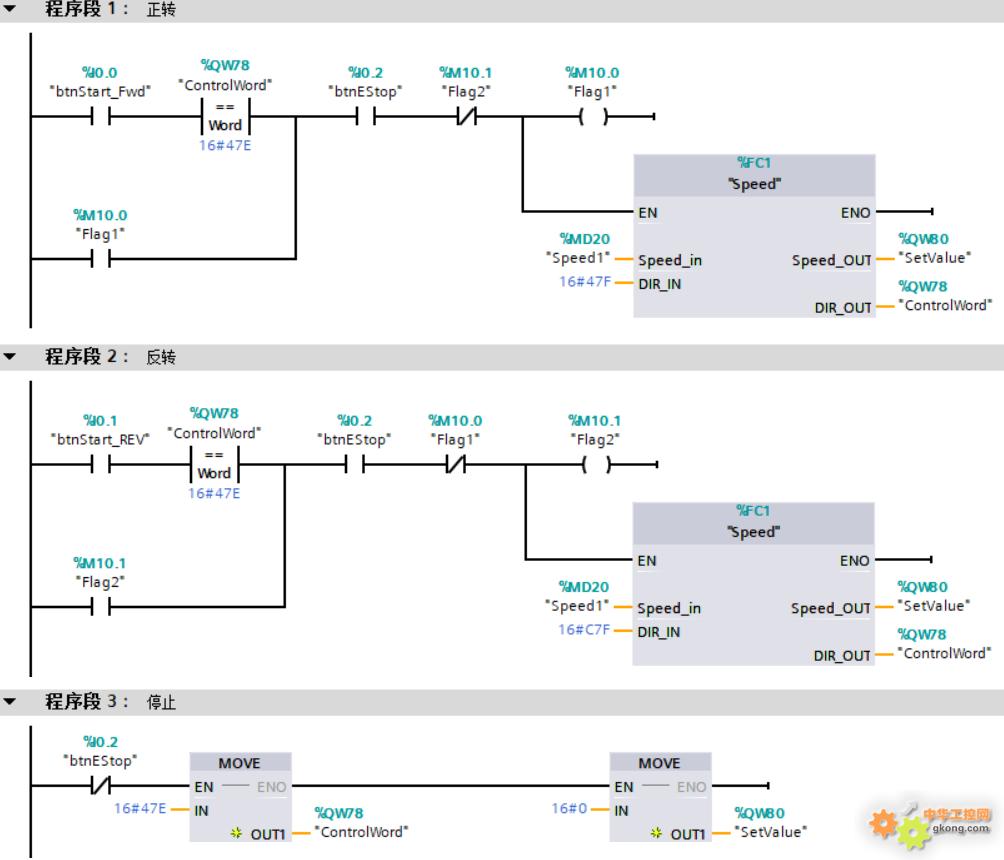
图12 OB1中的主程序
以CPU 1511-1PN为控制器的组态和程序与以CPU 1211C的类似。
推荐阅读
畅销书作者向晓汉倾心力作,多年工程经验一手传授!图解+实例+700分钟视频!
▊《变频器、步进与伺服系统应用技术:基于SINAMICS G120/V90》
向晓汉编著本书从基础和实用出发,涵盖的主要内容包括:变频器的工作原理;SINAMICS G120变频器的接线与操作;SINAMICS ?G120变频器的运行与功能;SINAMICS G120变频器的外围电路;SINAMICS V90伺服驱动系统与接线;SINAMICS V90伺服驱动系统的运行与功能;SINAMICS G120/V90伺服系统的通信及其应用。
福利大放送
为回馈广大粉丝的支持,我们会抽取4名文末留言用户,赠送《变频器、步进与伺服系统应用技术:基于SINAMICS G120/V90》书籍一本。
参与方式:
1、文末留言分享您喜欢此篇文章的理由,或者对工作的一些心得体验,赶快来评论区分享吧!
2、 我们会抽取4位幸运宝宝,赠送【变频器、步进与伺服系统应用技术:基于SINAMICS G120/V90】书籍一本,点赞统计截至1月20日中午12点。
注:中奖者请于开奖后当天内于公众号后台留言收货信息或评论区留言收货信息 ,我们将安排寄送图书,逾期视为放弃领奖。
最后修改:2025/1/10 11:00:19




