
1,PLC硬件组态,
2,EtherCAT,控制轴组态。(电子齿轮什么的自行配置,不再赘述,我这里默认就一轴,只配置编码器一圈8388608,工作台移动量10unit)
3,回原点模式35。
4,配置EtherCAT 轴过程数据(默认选择输入、输出不能满足控制条件,我图方便,直接勾选)如图,、
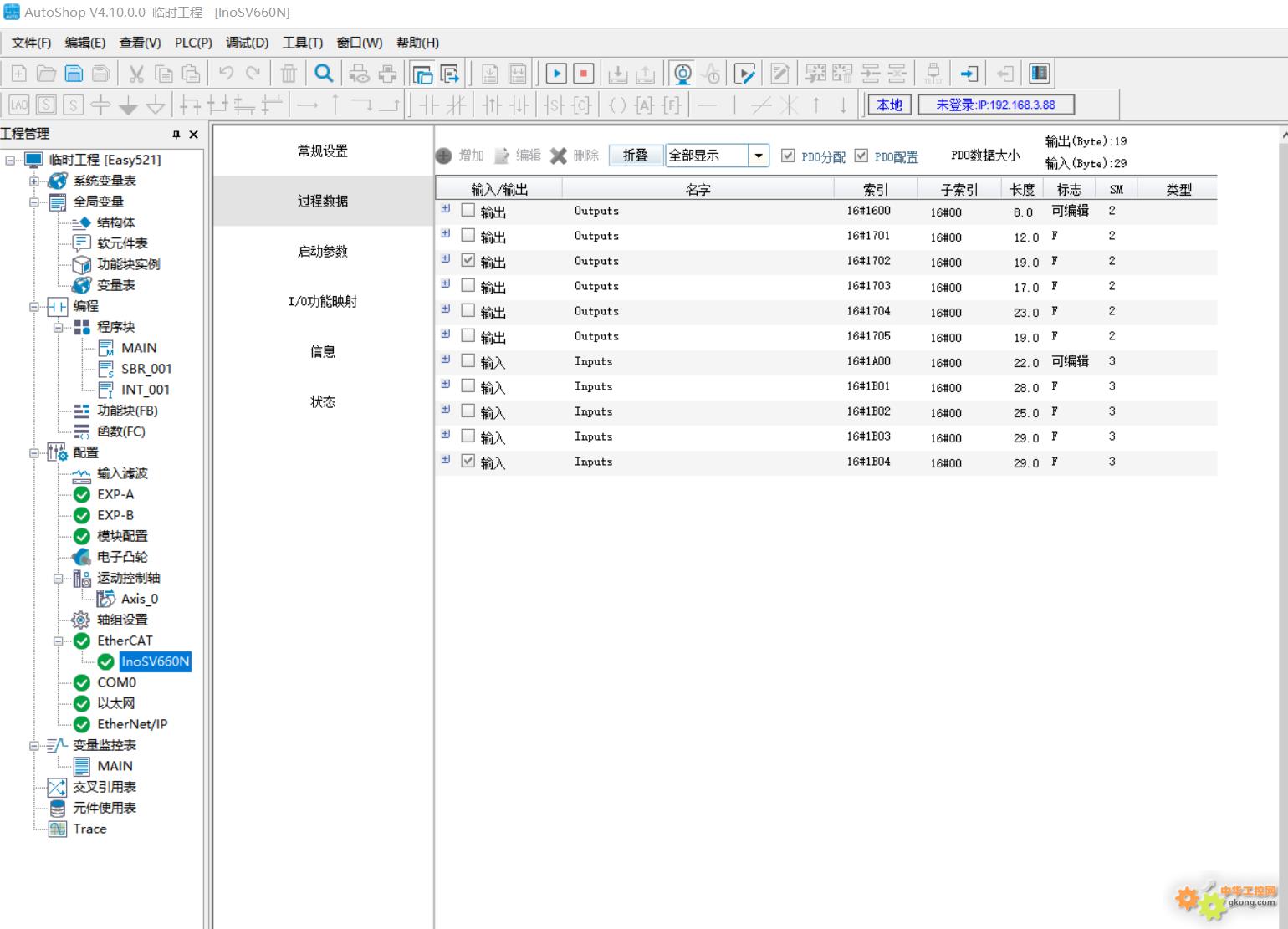
4.1,伺服ON,
4.2,满足回原条件以后,启动MC_SyncTorqueControl(力矩,速度根据自己情况配置)
4.3,等待力矩达到,启动MC_STOP让轴停止
4.4设置当前位置为0点(启动MC_HOME)。
程序部分截图:

附件:
[本地下载]END