对FANUC机器人编程有了解过的朋友都知道FANUC机器人码垛有四种方式:B码垛、BX码垛、E码垛、EX码垛:
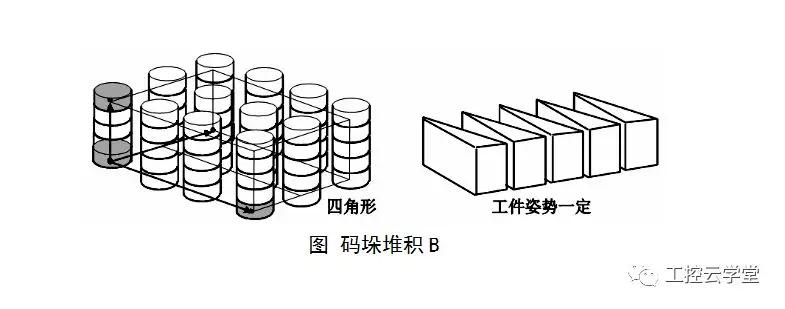
码垛堆积B,对应所有工件的姿势一定、堆上时的底面形状为直线、或者平行四边形的情形。
码垛堆积E,对应更为复杂的堆上式样的情形(如希望改变工件的姿势的情形、堆上时的底面形状不是平行四边形的情形等)。
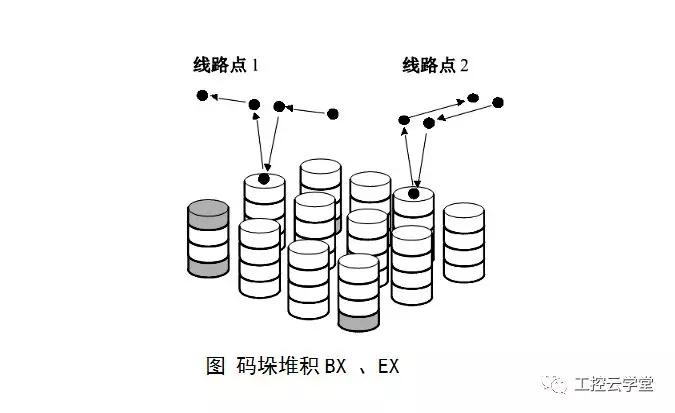
码垛堆积 BX、EX
码垛堆积 BX、EX,可以设定多个线路点。码垛堆积 B、E 只能设定一个线路点。
接下来我们学习如何编写B码垛指令!
码垛指令如下图所示;
码垛指令编写步骤:
1、点击 指令 → 码垛 如下图所示;
2、选择 PALLETIZING-B B码垛;
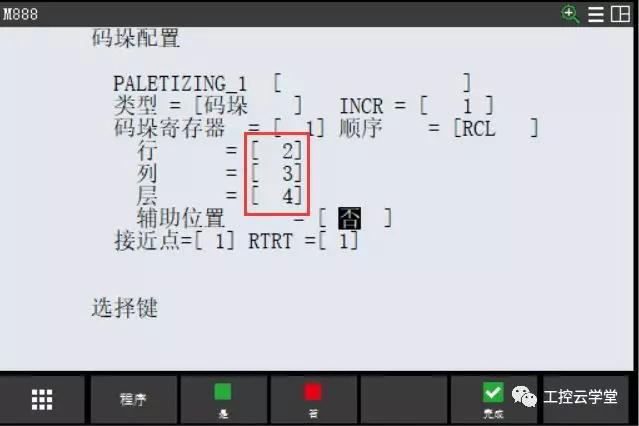
3、进入码垛配置界面,进行配置,如下图所示配置是一个2行3列4层的码垛规格;设置完成后点击 完成 进入码垛底部点设置;
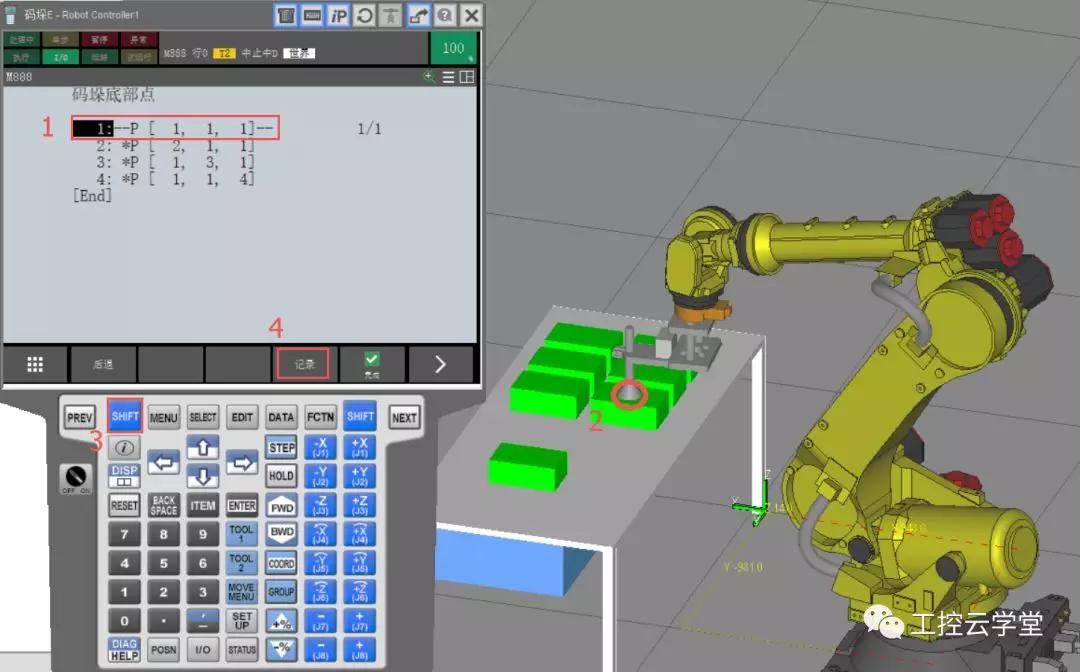
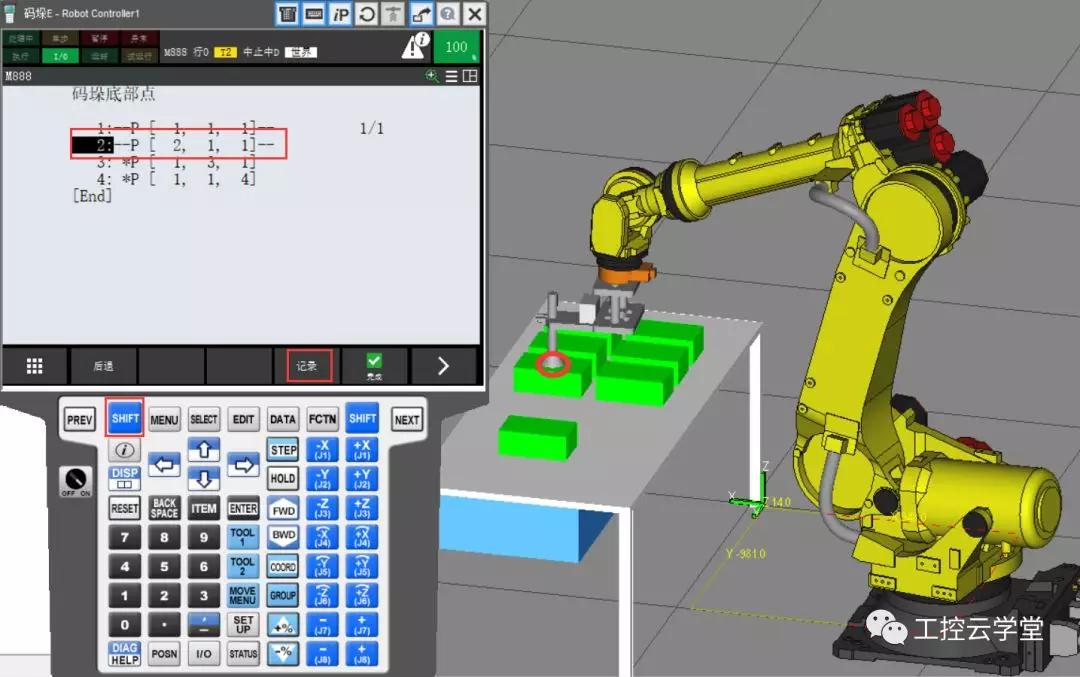
4、此时需要设定四个点,让机器人自动计算出其余产品的位置;将光标移动到需要设定的位置,然后示教机器人到对应的产品位置,同时按住[SHIFT] + 记录,这样就把机器人当前的位置记录下来了,如图下所示;
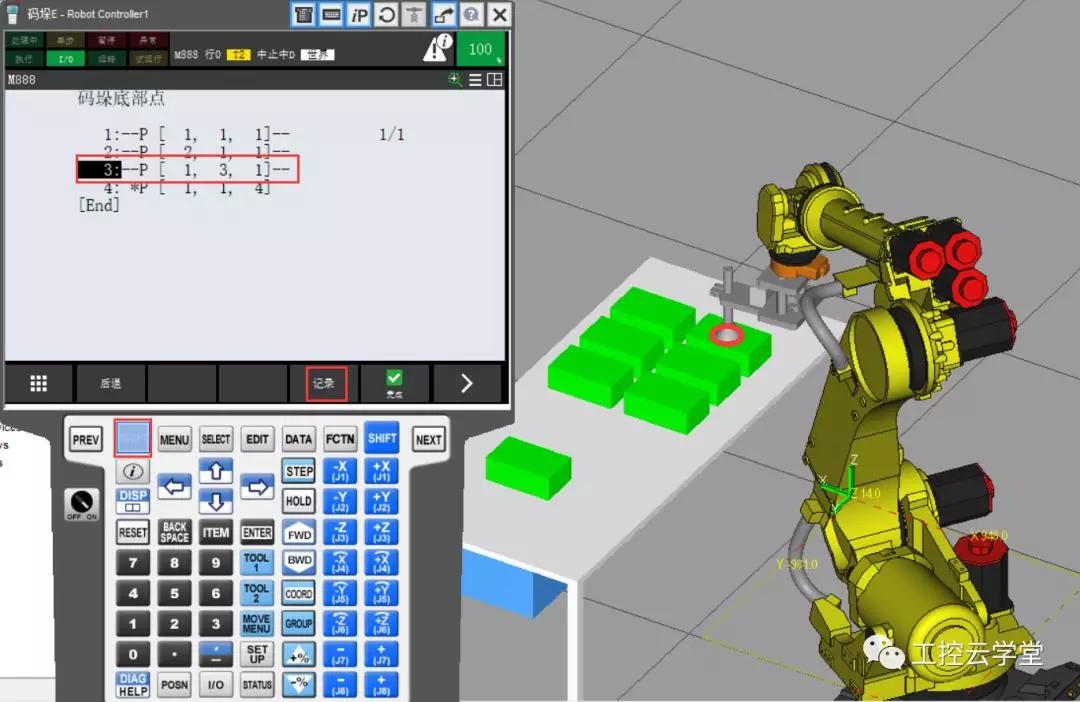
5、按照第四步步骤进行记录第二个位置,如下图所示;
6、按照第四步步骤进行记录第二个位置,如下图所示;
7、按照第四步步骤进行记录第二个位置,如下图所示;
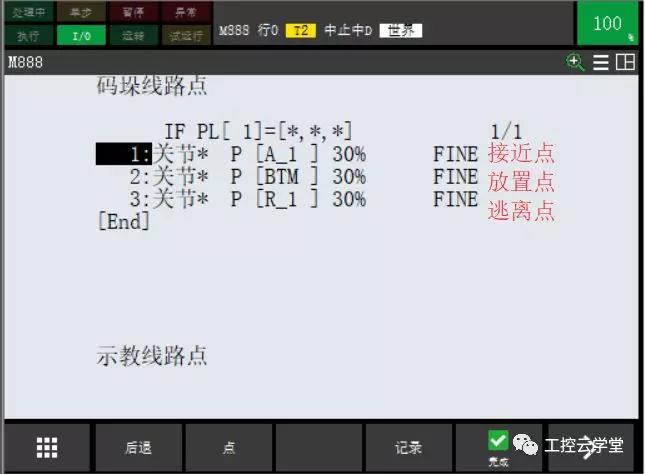
8、点击完成,进入码垛线路点设置,如下图所示;
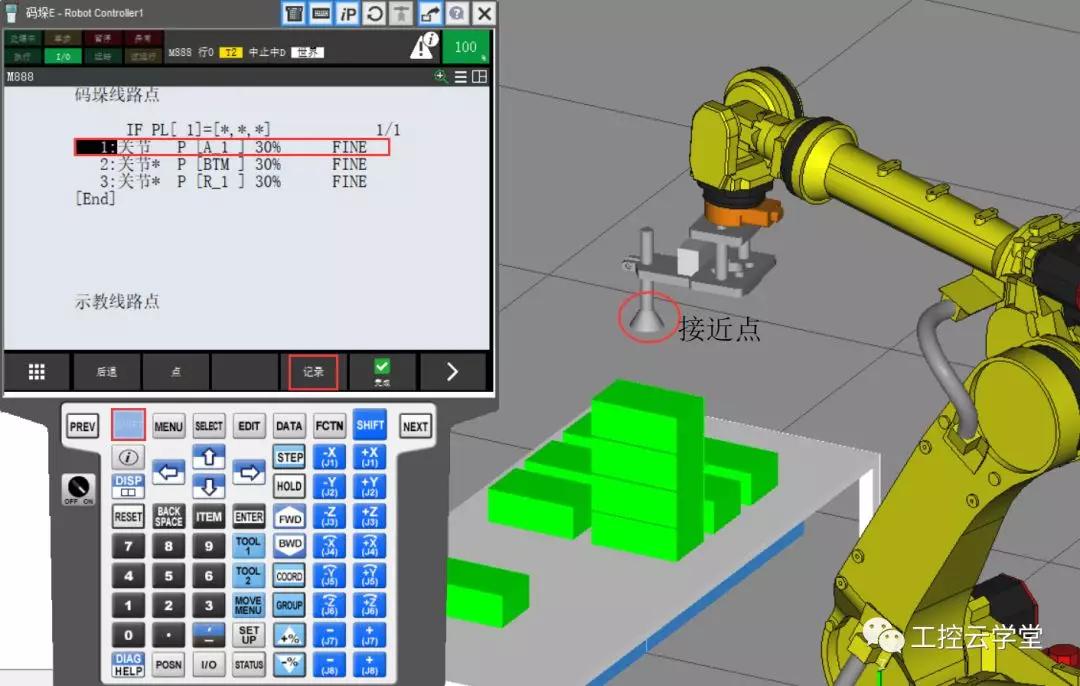
9、将机器人移动到接近点(产品放置点上方),同时按住[SHIFT] + 记录,这样就把机器人当前的位置记录下来了,如图下所示;
10、将机器人移动到产品放置点,同时按住[SHIFT] + 记录,这样就把机器人当前的位置记录下来了,如图下所示;
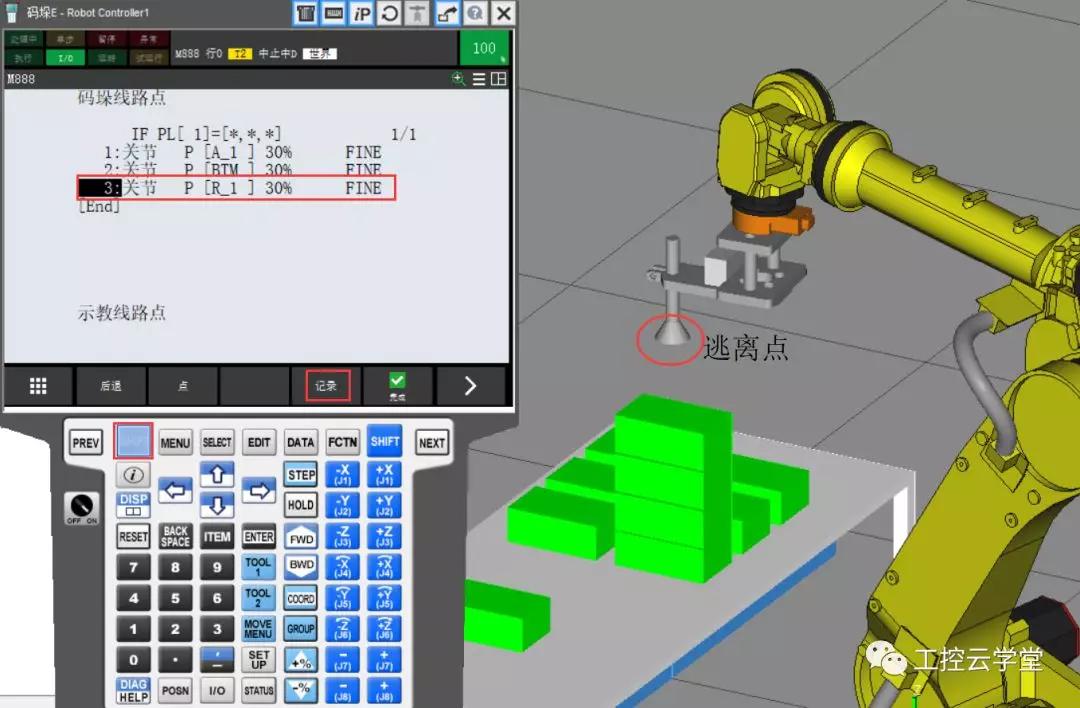
11、将机器人移动到逃离点(产品放置点上方,可以与接近点相同),同时按住[SHIFT] + 记录,这样就把机器人当前的位置记录下来了,如图下所示;
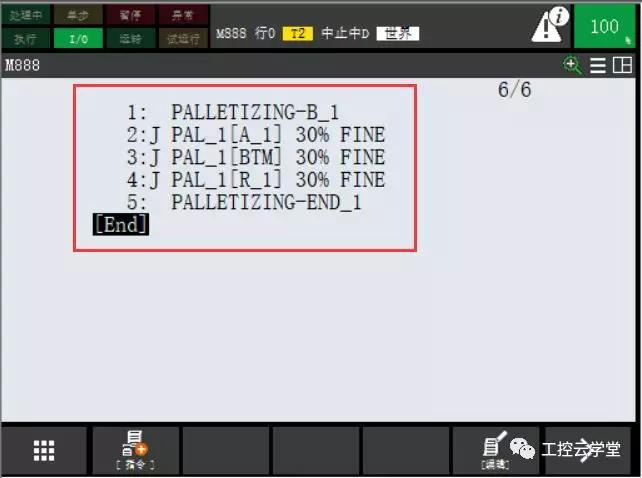
12、点击完成,这样码垛指令的编写就完成了,如下图所示;
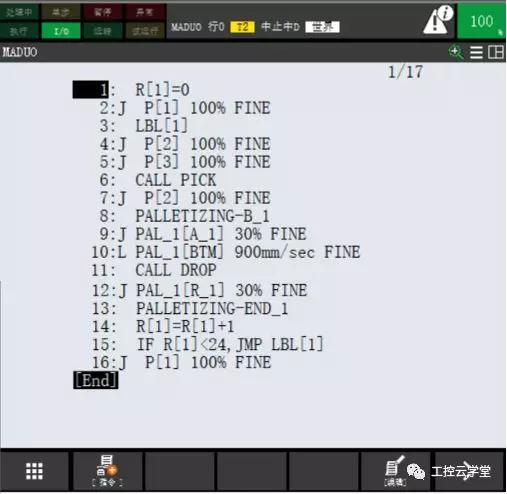
13、最终程序编写成如下图所示,即可让机器人搬完2*3*4的码垛规格后就停止搬运了。
最后修改:2022/1/7 17:29:47