登录
首页
PLC论坛
西门子SIEMENS
回帖
发帖
正文
主题:200smart运动goto指令驱动伺服定位完成的done位实现状态机转换
点击:2423 回复:4
楼主
编辑
引用
管理
matlac
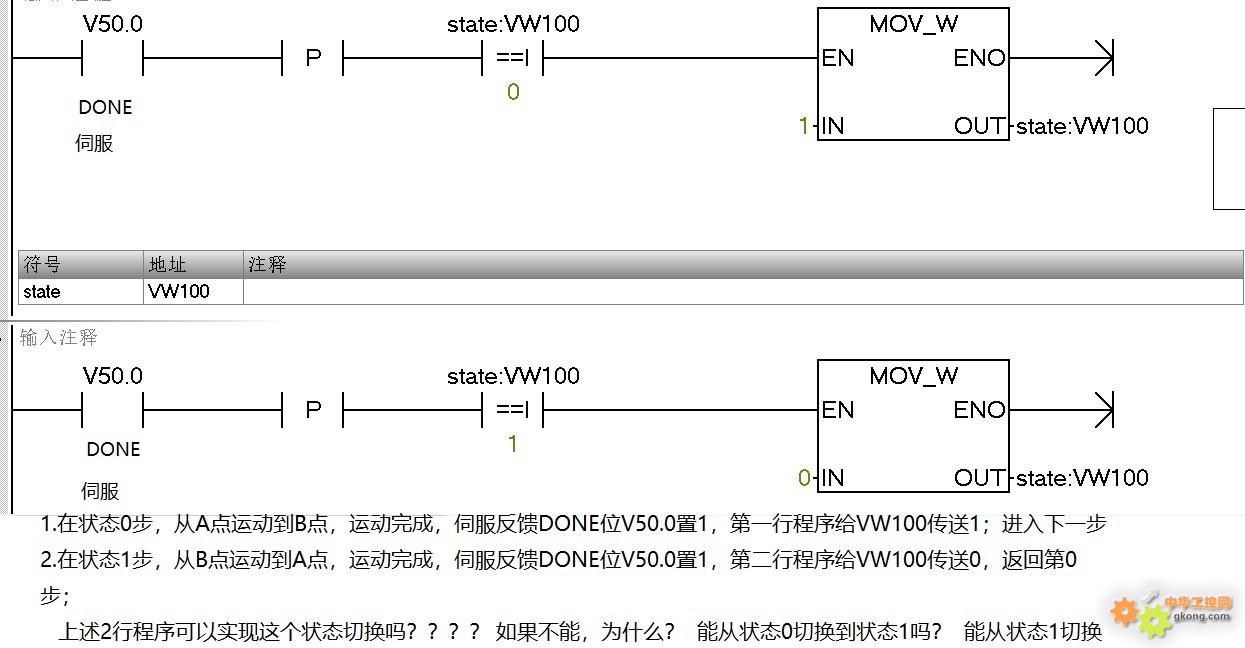
工艺要求是A点到B点之间来回运动, 状态一开始为0,然后从A点运动到B点,利用伺服完成位DONE的上升沿将状态变为1(vw100=1);
然后再从B点返回A点,利用利用goto指令驱动伺服完成位DONE的上升沿将状态变为0(vw100=0);
所以这里的伺服完成DONE位信号上升沿切换状态成了关键,程序就是2行,见图片,请大家指教这两行程序有什么问题,能否实现?为什么能实现?
如果不能实现,如何改进? 你觉得问题出现在哪里???
分析这个程序要深刻理解PLC程序的扫描逻辑
最后修改:
2021/3/8 13:49:53
21-03-08 10:46
1楼
编辑
引用
管理
liuyang7946
不能实现
21-03-09 09:03
2楼
编辑
引用
管理
管杀不管填
学习学习
21-03-12 10:17
3楼
编辑
引用
管理
420135833
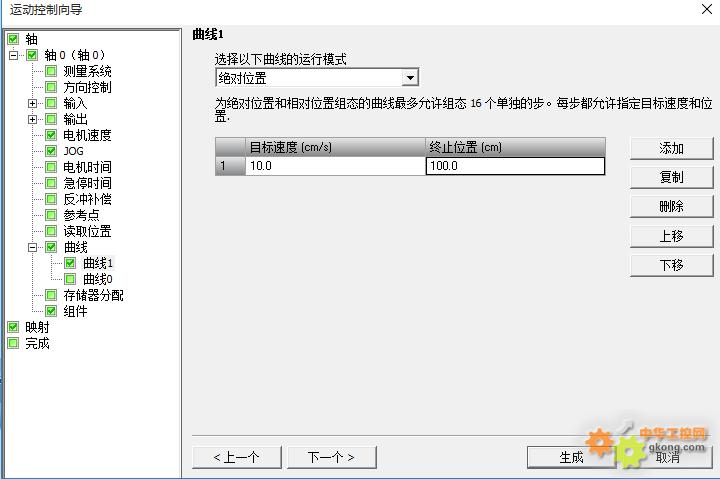
我感觉你运动控制这么单一,,还不如在运动向导里面设置两个曲线运动,,直接调用AXISX-RUN,,我是新手,不知对不对
21-04-29 19:44
4楼
编辑
引用
管理
jij0365674
不能,这个扫描到下面那行,直接赋值0了
21-05-05 16:41
工控新闻
BIS-6690P-B10:适用于高效处理和泛在连接的桌面型工控机
加速数字化应用,施耐德电气助力路桥隧道行业驶入绿色发展快速路
华北工控BIS-6390ARA-D10:应急管理系统的“智慧大脑”
罗克韦尔自动化发布年度《智能制造现状报告:生命科学版》
签了!海尔卡奥斯又多了一个伙伴
全球视野 算领未来,施耐德电气助力数据中心把握智算机遇
新TILTIX 系列发布-POSITAL 推出升级版加速度补偿的动态倾角仪
加入SICK视觉系统集成商团队,共创智能未来
更多新闻资讯