
不同应用场合,对机器的精度要求不一样。
如果是简单的搬运、码垛、机床上下料等场合,无论是精度还是稳定性,好多国产机器人都已能很好胜任了。
对精度、速度、稳定性等要求很高的场合,建议还是用大品牌的机器人较好。
这两条自动线的码垛,都是已入口点作为基准点,然后用偏移指令,把每一垛的坐标算出来的,纯逻辑处理,没有用码垛工艺。
如果是简单的搬运、码垛、机床上下料等场合,无论是精度还是稳定性,好多国产机器人都已能很好胜任了。
对精度、速度、稳定性等要求很高的场合,建议还是用大品牌的机器人较好。
这两条自动线的码垛,都是已入口点作为基准点,然后用偏移指令,把每一垛的坐标算出来的,纯逻辑处理,没有用码垛工艺。
20-01-03 09:04

你没有看懂我的意思,我的意思是,码垛的空间坐标是如何运算的具体到工程应用上,如何才能既快又准地实现空间坐标的运算。所谓精度,国内无需考虑,根本问题是空间坐标运算工艺问题。
![附件 1.jpg]()
![附件 2.jpg]()
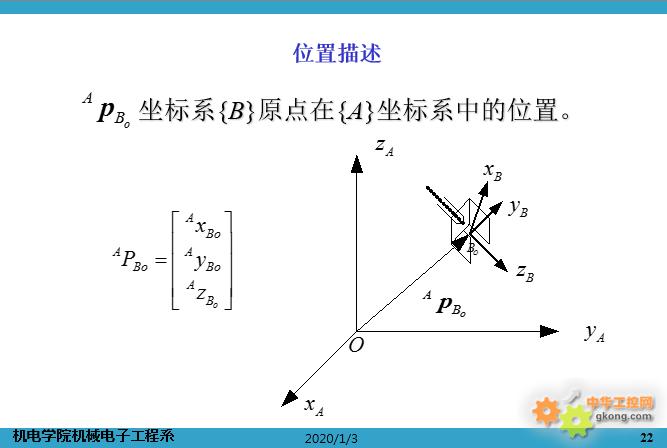
![附件 3.jpg]() 这个刚体、关节、手抓坐标算法问题,你们有相关产品的自主知识产权吗?
这个刚体、关节、手抓坐标算法问题,你们有相关产品的自主知识产权吗?


20-01-03 09:19
您好,本人不是做机器人控制器研发工作的,所以无法回答您提出的那些深奥问题。
一直以来,我都是做自动线的,属于设备组合应用的范畴。
用过多种机器人,本人不喜欢用码垛工艺包,而是喜欢自己写逻辑,用偏移指令实现码垛。
用码垛工艺做码垛,虽然简单,但灵活性不够,无法很好地修正每一垛的坐标。
用偏移指令写逻辑,则可以把每一垛的坐标都校对得非常精准。哪怕日后某一垛的坐标有偏差,都可以独立校对该垛坐标,而完全不影响其它垛的坐标。
同时,程序的移植性非常好。
一直以来,我都是做自动线的,属于设备组合应用的范畴。
用过多种机器人,本人不喜欢用码垛工艺包,而是喜欢自己写逻辑,用偏移指令实现码垛。
用码垛工艺做码垛,虽然简单,但灵活性不够,无法很好地修正每一垛的坐标。
用偏移指令写逻辑,则可以把每一垛的坐标都校对得非常精准。哪怕日后某一垛的坐标有偏差,都可以独立校对该垛坐标,而完全不影响其它垛的坐标。
同时,程序的移植性非常好。
20-01-04 11:56
你的意思是不是只设几个外部参数就自动开始码垛了,而楼主的是笨方法每一包都有坐标,如果换机器人位置的话楼主得重新设一遍,而如果有算法的话只需要设定起始地点终点,以及物料参数就行了
20-03-11 22:37
