只有实验才能出真知
于是我做了一个小小的实验,一台变频器,一个传感器做反馈
设置变频器第一条A通道为变频器面板电位器
第二条B通道为PID通道
设置变频模式为A-B
PID参数设置
设定值为50%
反馈通道选择位移传感器
特性为负特性(正反馈)。
比例增益KP=1
积分时间=0
微分时间=0
理论阶段
根据PID定义,U(k)=Kp*E(k)
此时位移传感器在0处,则E(k)=50%,由于是负特性则KP=-1;
计算可得U(k)=-50%;
变频器上限为50HZ,则PID输出50*-50%=-25HZ;
面板电位器旋转到25HZ
模式为A-B,则变频器输出为25-(-25)=50HZ;
移动电位器到50%,偏差为0,PID输出为0,变频器输出为25HZ;
移动电位器到%100,偏差为-50%,PID输出为+25HZ,变频器输出0HZ;
实验阶段
设置相同
当电位器在0处时,PID输出为-0.25HZ,变频器实际输出为25--0.25=25.25HZ;
当电位器在50%处时,PID输出为0HZ,变频器实际输出为25--0.25=25.25HZ;
当电位器在100%处时,PID输出为0.25HZ,变频器实际输出为25-0.25=24.75HZ;
设置KP=4;
当电位器在0处时,PID输出为-1HZ,变频器实际输出为25--0.25=26HZ;
当电位器在50%处时,PID输出为0HZ,变频器实际输出为25--0.25=25HZ;
当电位器在100%处时,PID输出为1HZ,变频器实际输出为25-0.25=24HZ;
设置KP=100,就和理论结果相同了
结论,变频器的比例增益,并不是PID公式中的比例系数,而是把比例系数放大了100倍的一种参照增益
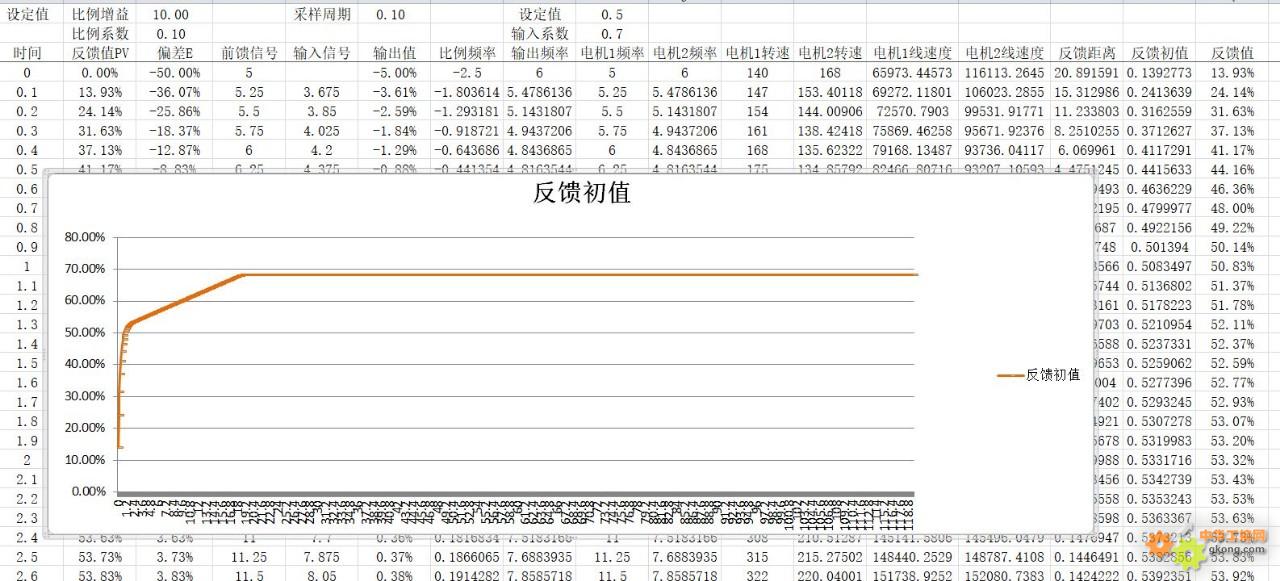
EXCEL仿真图
此为比例增益为100,也就是比例系数1来计算,系统明显发散振荡
此为比例增益为10,也就是比例系数0.1来计算,系统可行,因为是模拟,所以不存在干扰,因此看起来比较平稳,实际应用中还是会有一点振荡
因此在实际应用中,比例系数很少用到大于1的情况,变频器厂家应该是为了方便设置和精度,才把比例系数放大100倍作为比例增益来用。
总结完毕
最后修改:2019/7/29 11:07:37