最后修改:2017/11/21 12:05:29
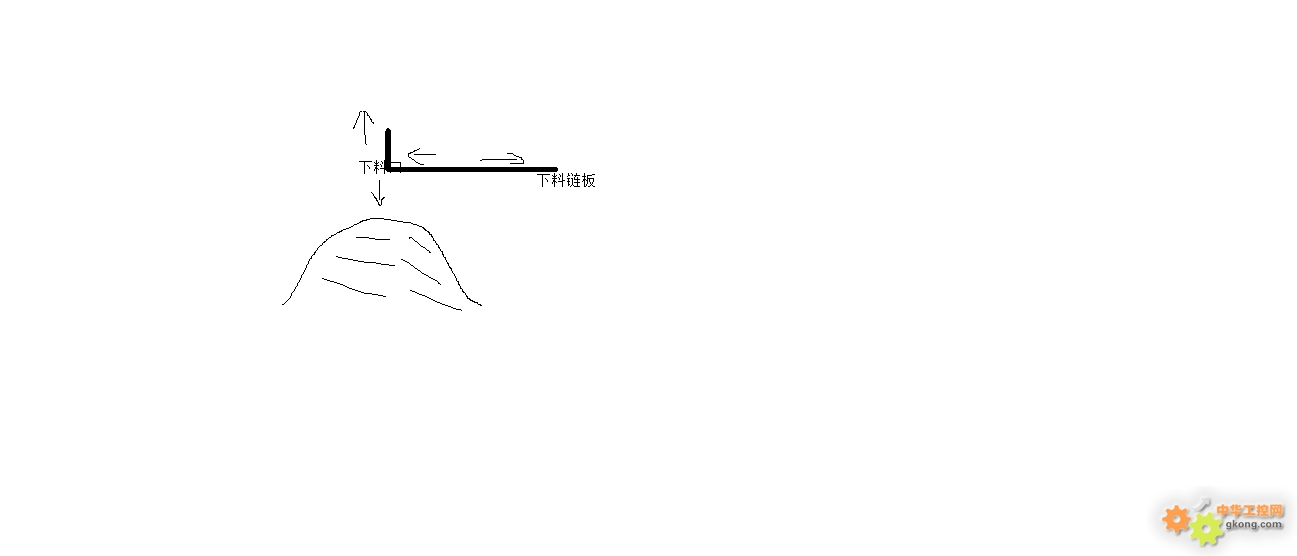
如图,横着的链板分别用两台电机控制上下和左右移动,链板有一台电机,都不是伺服,就是普通电机。现在需要将物料堆成图中形状,也就是蒙古包状,如何控制链板的上下和前后移动?还有链板一直不停旋转的。有什么好想法请各位多多指点一下。
17-11-20 15:39