


引用 koofly 在 2016/1/21 13:51:43 发言【内容省略】
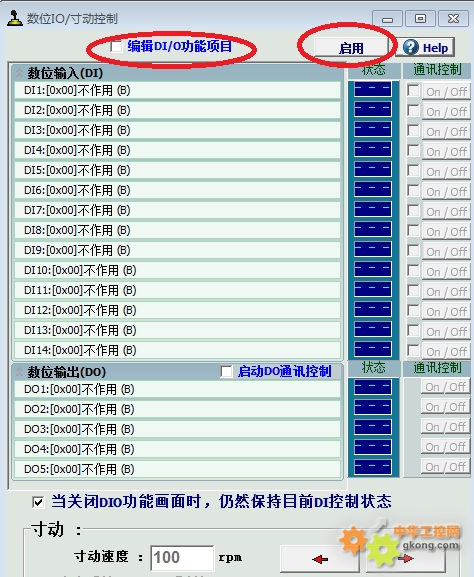
谢谢,原来没连接的时候这个寸动图标是灰的,想问下回归原点启动,复归原点通了怎么停不下来
16-01-21 14:27
现在就差一个问题,原点复归方式:X:2:正方向原点复归ORG:OFF->ON作为复归原点,在回原点的时候,原点检测停下来回轻微往后转一点,Y信号设置一律不找Z,速度也降下来没有用
16-01-21 15:23