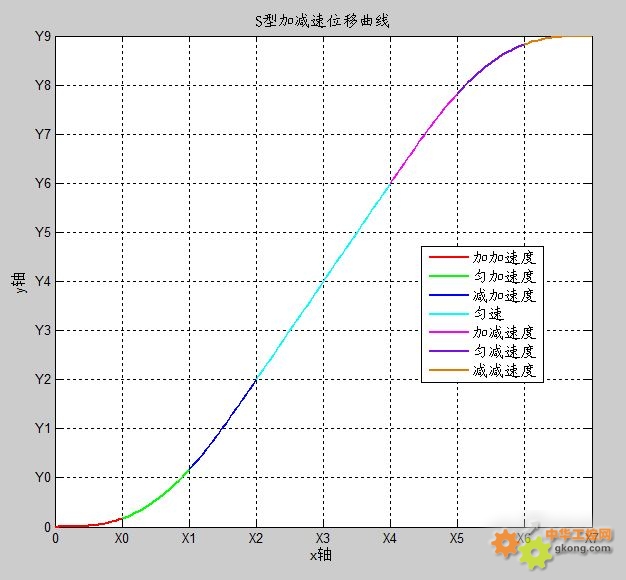
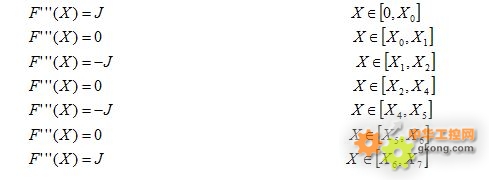
S形加减速曲线位移函数:
![附件 20.jpg]()
![附件 21.jpg]() S形加减速曲线速度函数:
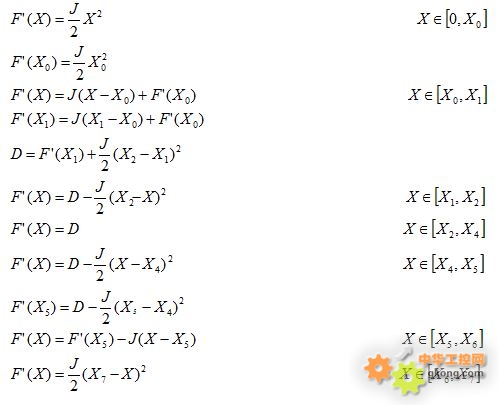
S形加减速曲线速度函数:
![附件 22.jpg]()
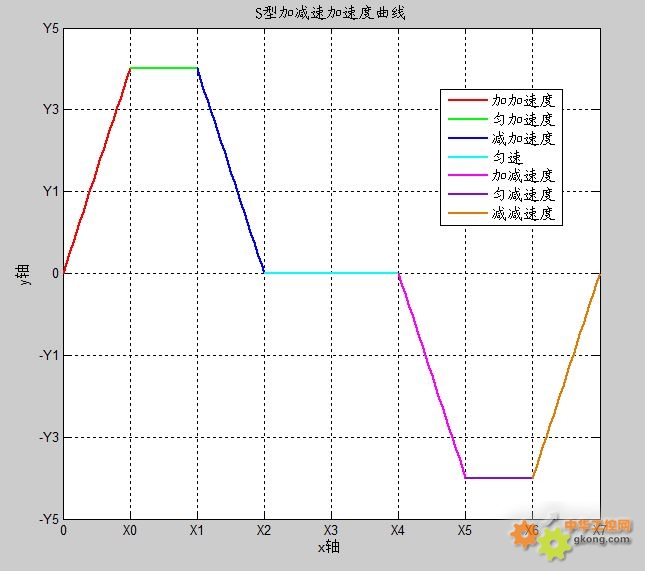
![附件 23.jpg]() S形加减速曲线加速度函数:
S形加减速曲线加速度函数:
![附件 24.jpg]()
![附件 25.jpg]() S形加减速曲线跃度函数:
S形加减速曲线跃度函数:
![附件 26.jpg]()
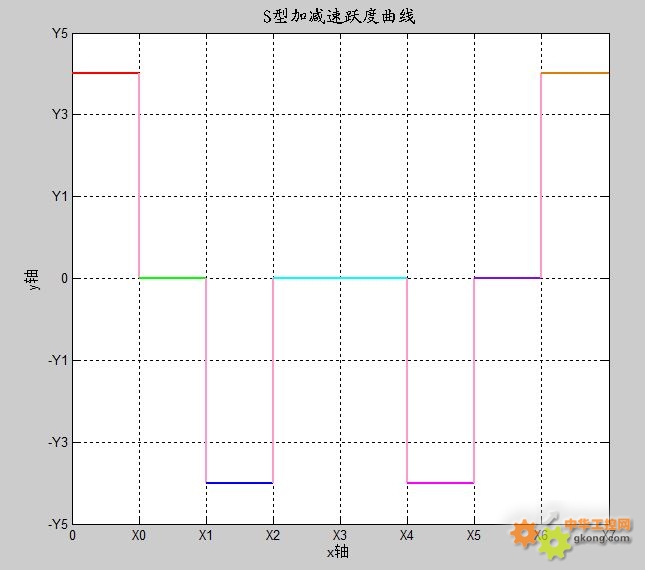
![附件 27.jpg]() 由上图可知S形加减速曲线是7段加减速过程,在加减速启动和结束阶段进行加减速,使速度变化柔和,减少冲击。特点:适合中速运行。
由上图可知S形加减速曲线是7段加减速过程,在加减速启动和结束阶段进行加减速,使速度变化柔和,减少冲击。特点:适合中速运行。



15-12-21 19:26



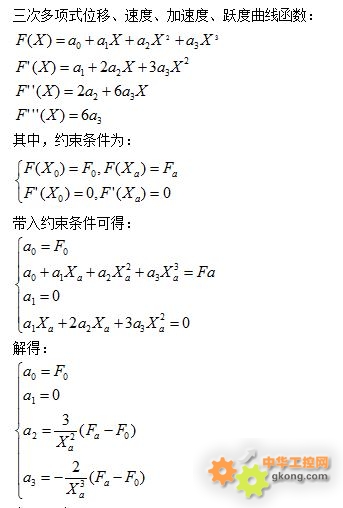
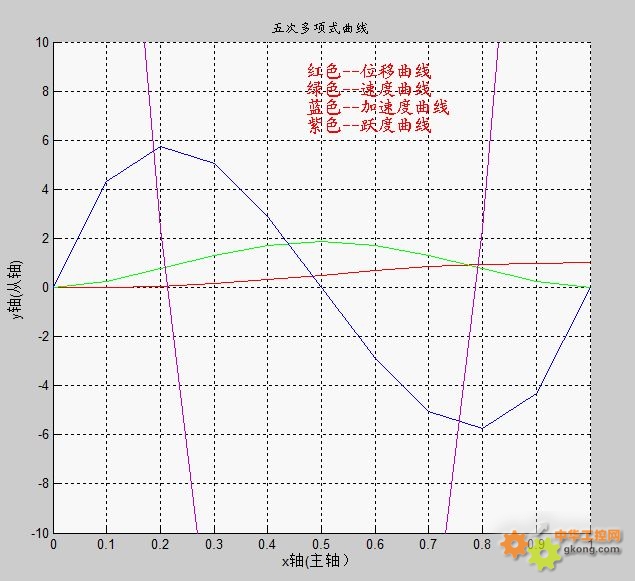
当X=1时,F(1)=1,F’(1)=0
可得a0=0,a1=0,a2=3,a3=-2。
将系数带入上式曲线函数,可得位移、速度、加速度、跃度曲线函数:
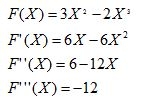
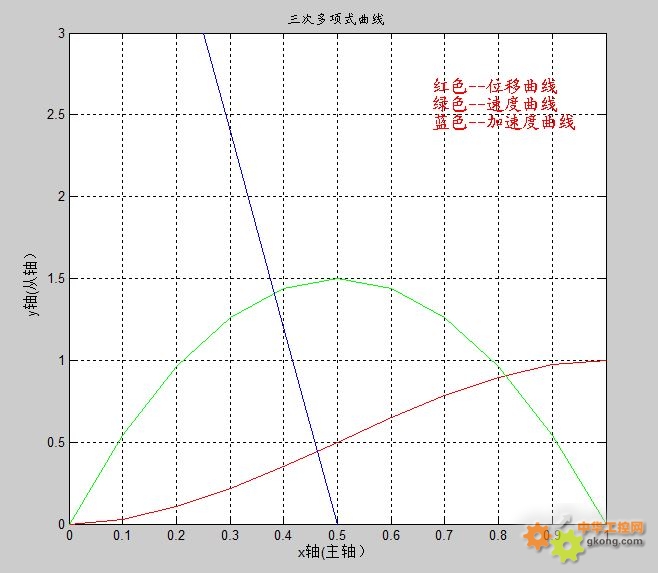
2)能够保证位置和速度的平滑过渡,但在两端加速度不平稳、连续。
15-12-21 22:23
我这帖看的人这么少,如果我换个标题为《首次在外接活,让我挣了近3万》或者《我在外做的两组四轴联动设备》,肯定很火。不管怎样,我还是会继续写完的,知识的整理也能方便以后自己用的更熟练。
15-12-22 09:33