
一、起始方向Start_Dir为反向,即左向
1、终止方向 Final_Dir与Start_Dir一致的情况
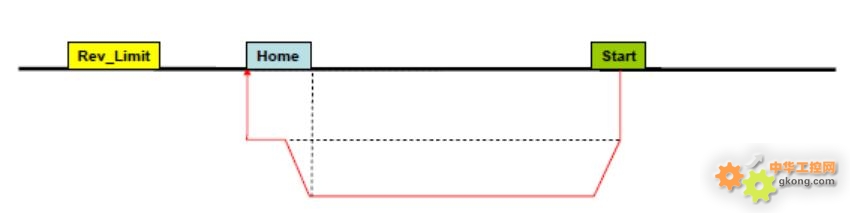
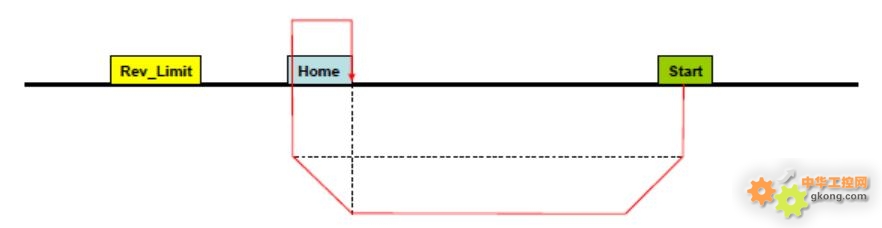
(1)![附件 02.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在Home的左侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在Home的左侧,完成回原点过程 。
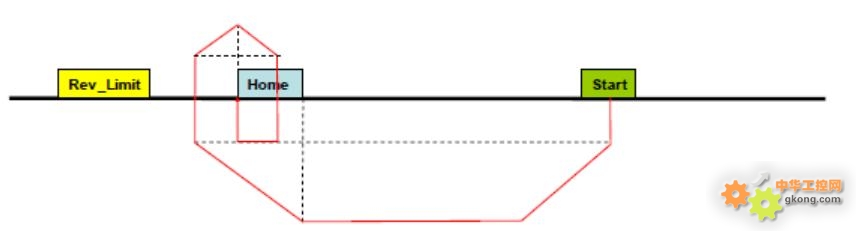
(2)![附件 03.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在Home的左侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在Home的左侧,完成回原点过程 。
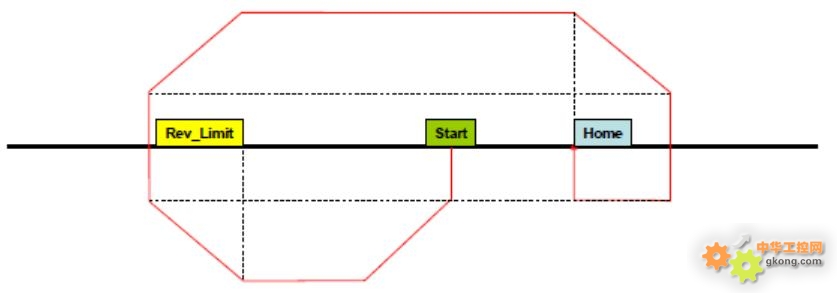
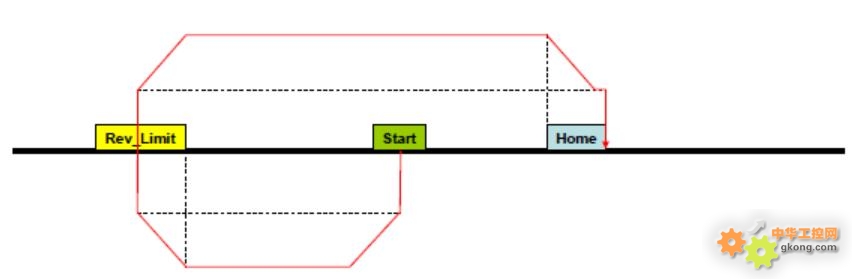
(3)![附件 04.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在Home的左侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在Home的左侧,完成回原点过程 。
1、终止方向 Final_Dir与Start_Dir一致的情况
(1)
(2)
(3)
15-07-09 17:40
2、终止方向 Final_Dir与Start_Dir相反的情况
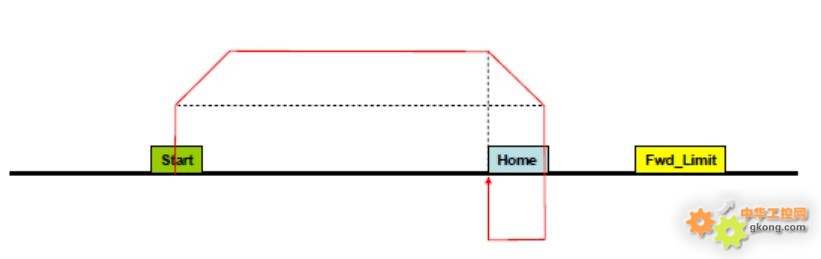
(1)![附件 05.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,轴停在Home的右侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,轴停在Home的右侧,完成回原点过程 。
(2)![附件 06.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,则轴停在Home的右侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,则轴停在Home的右侧,完成回原点过程 。
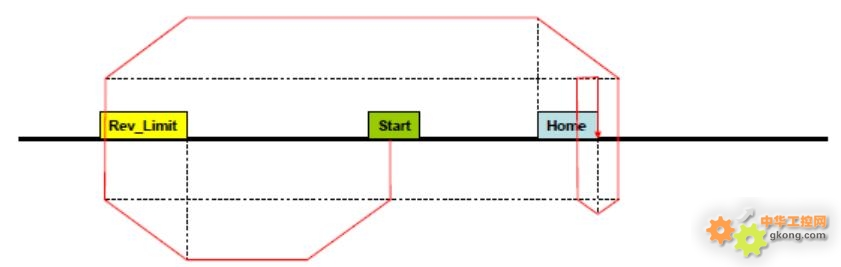
(3)![附件 07.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,轴停在Home的右侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,轴停在Home的右侧,完成回原点过程 。
(1)
(2)
(3)
15-07-10 08:23
二、起始方向Start_Dir为正向,即右向
1、终止方向 Final_Dir与Start_Dir一致的情况
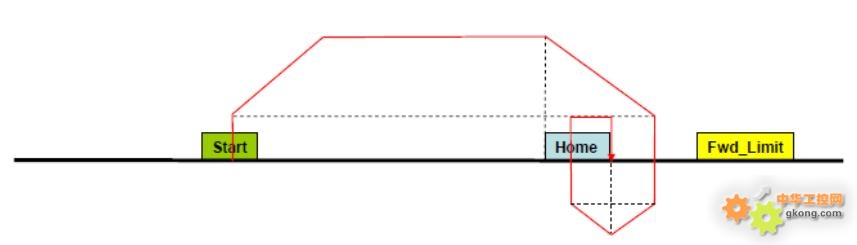
(1)![附件 08.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在与起始方向Start_Dir相同的方向的Home的右侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在与起始方向Start_Dir相同的方向的Home的右侧,完成回原点过程 。
(2)![附件 09.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相同 ,轴停在与起始方向Start_Dir相同的方向的Home的右侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相同 ,轴停在与起始方向Start_Dir相同的方向的Home的右侧,完成回原点过程 。
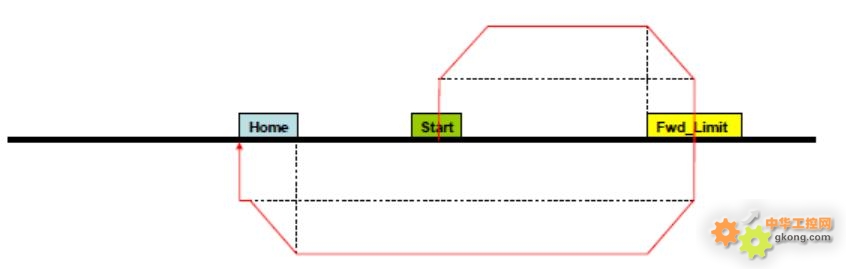
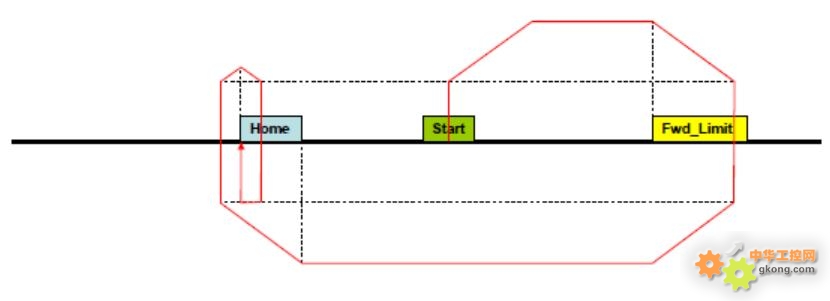
(3)![附件 10.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在与起始方向Start_Dir相同的方向的Home的右侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Rev_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头,因终止方向Final_Dir与起始方向 Start_Dir一致 ,轴停在与起始方向Start_Dir相同的方向的Home的右侧,完成回原点过程 。
1、终止方向 Final_Dir与Start_Dir一致的情况
(1)
(2)
(3)
最后修改:2015/7/10 8:40:40
15-07-10 08:39
2、终止方向 Final_Dir与Start_Dir相反的情况
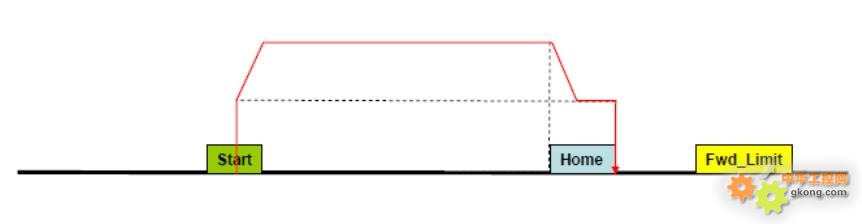
(1)![附件 11.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,调头,轴停在与起始方向Start_Dir相反的Home的左侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到Home上升沿时,开始减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,调头,轴停在与起始方向Start_Dir相反的Home的左侧,完成回原点过程 。
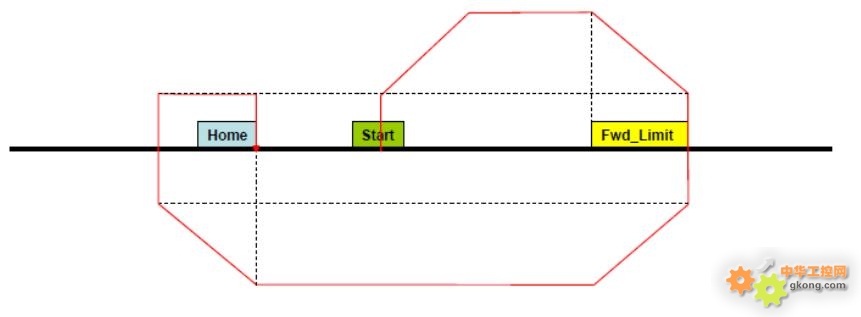
(2)![附件 12.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到正向限位Fwd_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,调头,轴停在与起始方向Start_Dir相反的Home的左侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到正向限位Fwd_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,调头,轴停在与起始方向Start_Dir相反的Home的左侧,完成回原点过程 。
(3)![附件 13.jpg]() 从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Fwd_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,调头,轴停在与起始方向Start_Dir相反的Home的左侧,完成回原点过程 。
从起始方向Start_Dir以Home_Fast_Spd开始寻找 ,遇到反向限位Fwd_limit后反向运动,遇到Home上升沿开始减速,在Home下降沿之前尚未减速到Homing_Solw_Spd,则等减速到到Homing_Solw_Spd后,调头加速,直到遇到Home上升沿,重新减速,如在Home下降沿之前如已经减速到Homing_Solw_Spd,因终止方向Final_Dir与起始方向 Start_Dir相反 ,调头,轴停在与起始方向Start_Dir相反的Home的左侧,完成回原点过程 。
(1)
(2)
(3)
15-07-10 08:56