关键词: 英威腾PLC,AGV,AGV中央调度系统,AGV远程监控,无人搬运车,无线局域网,远程控制系统,远程维护系统,伺服控制技术,WIFI,磁导航,GPRS模块。
一、应用简介
1.应用简述:AGV是无人搬运车(Automated Guided Vehicle)的英文缩写。是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴。AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产。广泛应用于汽车制造、机械、电子、钢铁、化工、医药、印刷、仓储、运输业和商业上。
2.AGV中央调度系统,AGV控制系统包括车上控制器和中央调度控制系统,均采用智能数字控制器,通过无线通信进行联系。AGV的控制指令由中央调度系统发出(PLC),存入车载控制器(单片机);AGV运行时,车上控制器通过通信系统从地面站接受指令并报告自己的状态。车上控制器可完成以下监控:手动控制、安全装置启动、蓄电池状态、转向极限、制动器解脱、行走灯光、驱动和转向电机控制与充电接触器的监控等。中央调度系统与AGV间可采用定点光导通讯和无线局域网通讯两种通讯方式。采用无线通讯方式时,控制台和AGV构成无线局域通讯网,控制台和AGV在网络协议支持下交换信息。无线通讯要完成AGV的调度和交通管理。
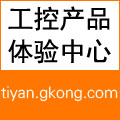
3.AGV远程监控维护系统,由于我司的AGV系统远销国内外,售后压力是很大的。传统的售后维护需要工程师到现场进行维护,所以消耗大量的时间和人力成本。本次建设的远程AGV监控维护系统就是通过英威腾GPRS模块,将AGV调度系统的数据远程传输给公司总部的售后维护中心,然后工程师再通过数据分析故障的原因和指导现场维护设备,从而节省了大量的时间以及人力成本费用。该远程维护模式是设备制造商将来才用的一个雏形和趋势。
4.为了实现AGV远程调度维护系统的目的,项目组采用今年11月在中华工控网体验项目中申请的“英威腾IVC2H智能逻辑控制器”开展了该项目的研究开发工作。由于英威腾智能逻辑控制器的较强通信能力,以及GPRS远程通信能力,AGV远程维护系统经过1个月的开发,改进,已经实现了通过串口自由通信,以及MODBUS,无线局域网通信等手段控制多台AGV的调度控制,实现AGV启动,停止,路径计算规划,站点停靠,物料对接,多任务下发,远程RPRS数据传输,远程维护等功能。英威腾PLC的强大的远程RPRS数据传输能力,以及方便的顺序控制功能,有利AGV系统功能的扩展很更改,获得了研发人员,以及用户的一致好评。
5.天津申能科技有限公司,是一家高科技企业,是天津市单片机学会理事单位。公司以推广先进工业信息化、自动化技术为使命,以专业打造智能化、无人化工厂为目标,公司致力于AGV及现代物流和工业机器人的开发与应用、非标自动系列设备设计,规划,安装,调试、并从远程工业控制技术的开发和应用,真正帮助企业实现数字化工厂。
二、应用说明
AGV是无人搬运车(Automated Guided Vehicle)的英文缩写,AGV小车系统涉及机械、电子、光学、计算机等多个领域。AGV最大的特点是无人引导运输,就是自动在工厂中行走,多台AGV在一起运行时,为了避免发生路线冲突,发生碰撞等事故,就需要一台管控系统,我们称之其为中央调度系统。中央调度系统的核心就是中央控制器,负责AGV路线规划,任务下发,报警处理,无线呼叫,以及配套伺服电机,气缸等控制。在中小型的AGV控制系统中一般采用PLC作为主机。在本次项目中我们采用了英威腾PLC作为中央控制器,利用其自由通信。MODBUS通信,以及GPRS远程数据传输等手段,将控制命令通过无线局域网及WiFi发送给AGV,实现现场AGV调度。然后将远程数据通过GPRS传输到我司的远程维护中心,工程师在维护中心就可以方便的进行AGV的管理和维护。
1. AGV远程维维护系统
远程维护中心

2. 系统组成及工作流程:
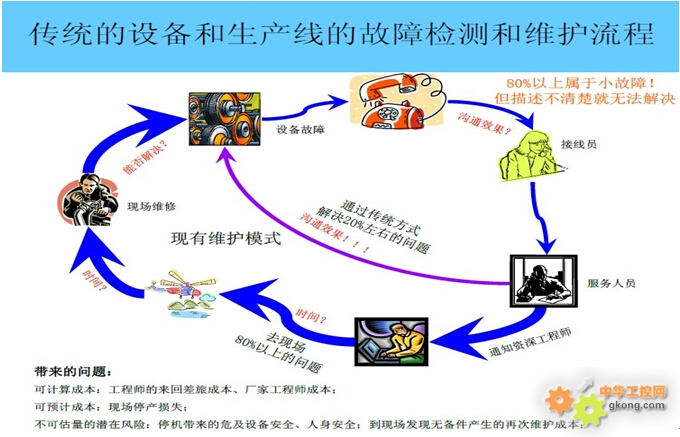
AGV中央调度系统主要由中央控制系统,AGV,人际交互系统三大部分组成,其中中央控制系统包括PLC,电源模块,保险装置,无限网络模块,继电器,等电器件。AGV包括,台车(带自动升降销), AGV控制单元、蓄电池、电池推车及电池托架等组成,人机交互系统包括,显示器,工控机,键鼠,交换机等。
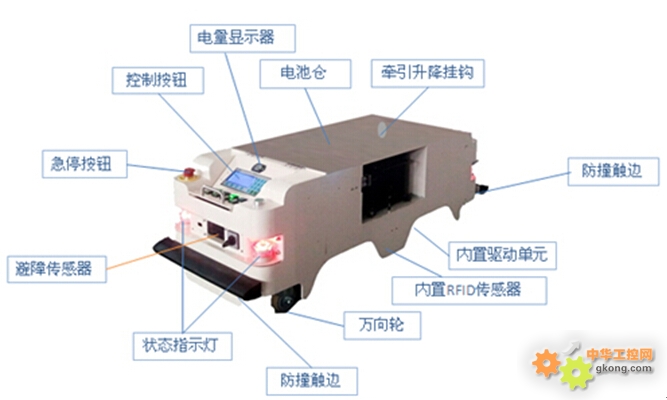
3.系统需要分析:该系统通过框架图可以看出,由于整个控制过程主要是通信控制,所以PLC的通信能力需要很强。英威腾IVC2H具有三个通信口,利用其较强的通信能力,和顺序控制能力,展开了项目设计,实施,以及调试工作。
三、应用的设计与实现
1. 系统接线图
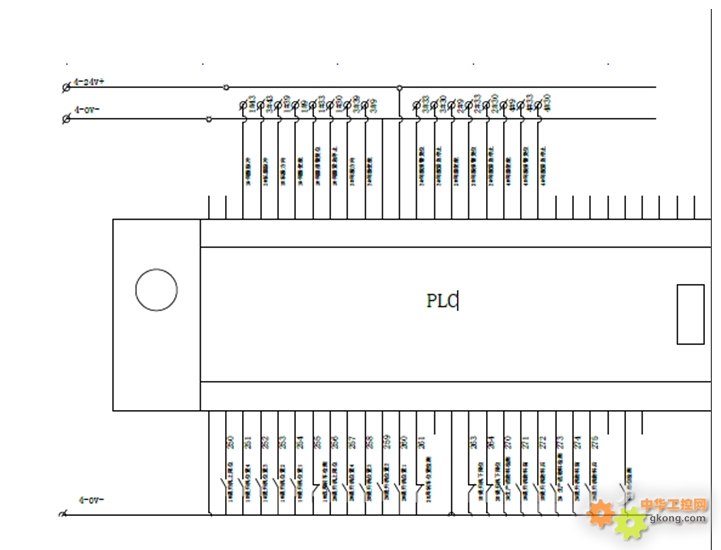
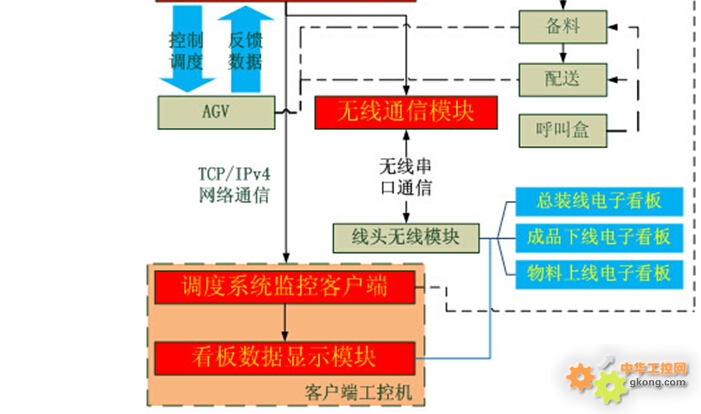
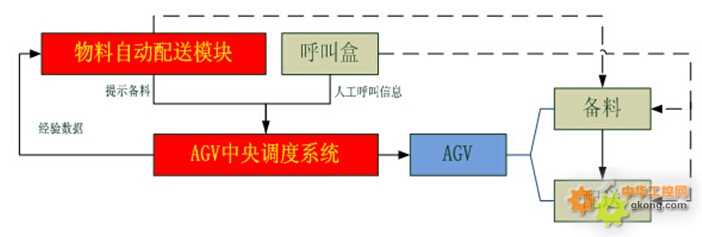
本系统使用英威腾PLC作为数据交换,控制的核心,通过WiFi和AGV车通信连接,AGV车将当前的状态,比如位置,速度,目标地址,电量多少等数据通过自由通信的方式回传给PLC,PLC根据回传的数据加以判读,然后管控AGV的路线,速度,启停,以及行进目标等。通过已经建立好的无线局域网,以自由通信的方式下发给相应的AGV。AGV接收到这些指令之后开始执行。调度系统有时间会接受呼叫系统的命令,呼叫系统会传送命令给调度系统,调度系统会指派相应的AGV去相应的位置,完成相应的动作及任务。这样调度系统就完成了AGV基本的调度,然后通过通英威腾IVC2L-GPRS将现场数据传输到我司的小型AGV监控中心,然后时间远程监控维护。
功能图如下:
2. I/O分配表
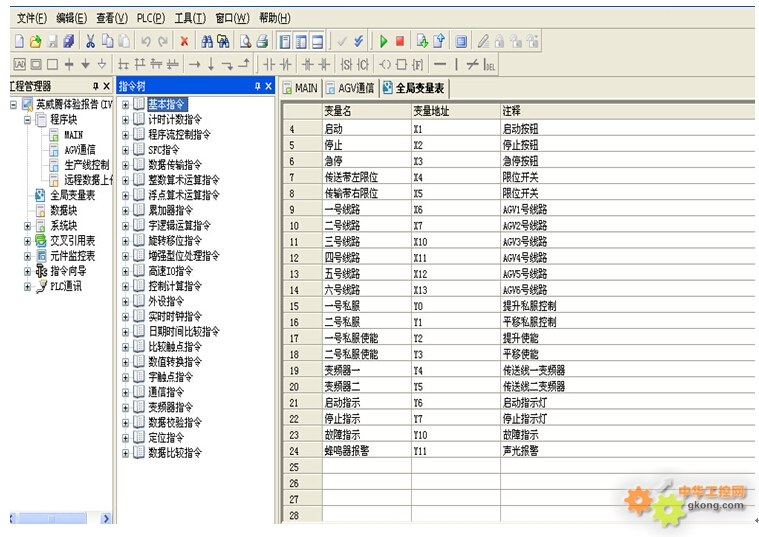
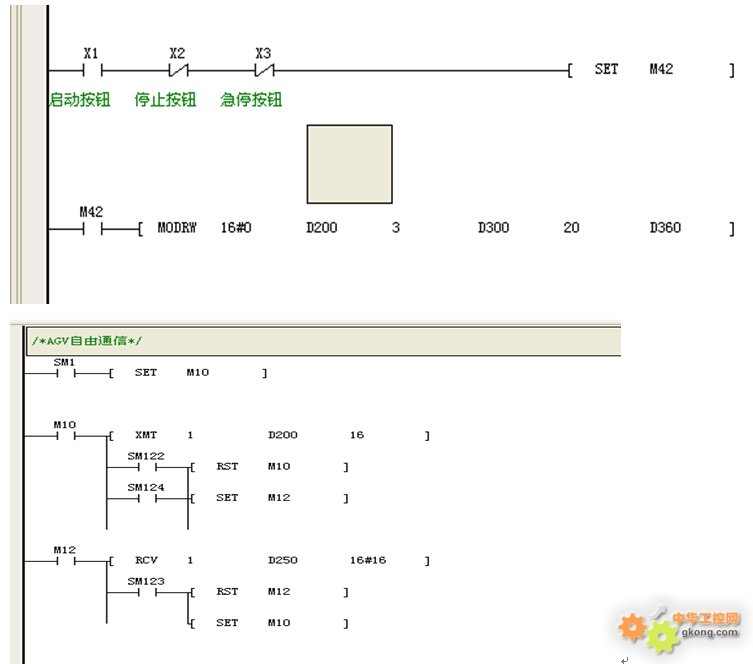
3.英威腾IVC2H控制程序说明
本项目针对的AGV调度控制,主要是MOUBUS通信,以及自由口通信。这些通信是连接AGV以及无线呼叫器的枢纽,没有他们AGV将失控,无线呼叫器也无发送信号。在本项目组中,连接通信口的都是通过无限局域网和下位机连接的。IVC2L-GPRS和远程的工控机连接,将现场的数据上传至远程维护中心,同时将控制中心的指令传输至AGV中。
4 应用设备图片展示
现场机柜照片

AGV调度系统调试中。

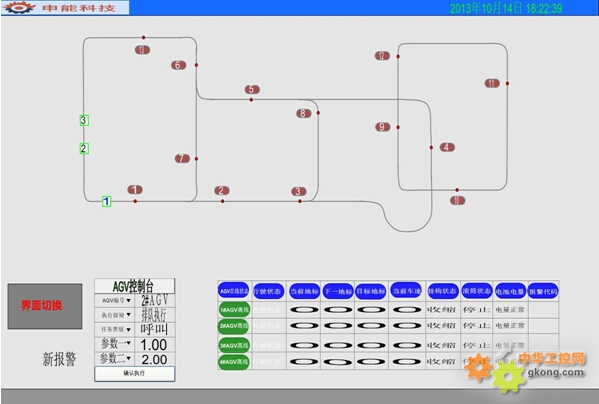
系统静态展示

远程监控维护中心AGV地图
四、应用体会
在本项目研究中,英威腾IVC2H作为AGV调度系统核心硬件之一,发挥出了它的极大优势,在在中小型调度系统中其表现出了很多优势,比如编程界面简洁有条理,程序员很容易上手,丰富的应用指令,CPU集成3个通信口,以及紧凑的结构都是令人喜爱的原因。
1.英威腾IVC2H在实际工控应用中,与以往我们用的西门子S7200PLC相比,节省了一个通信扩展模块,节省了空间和费用,同时由于其通信的扩展能力较强,也增加调度AGV小车的数量。英威腾IVC2H还具有非常好的可扩展性,需要增添、修改功能时,能够非常灵活地进行操作而几乎不影响现有的控制方案,在中小规模的控制系统中表现出了极大的优势。
2.英威腾IVC2H PLC可以扩展GPRS模块,可以通过GPRS网络回传数据到远程的计算机上,这样可以轻松实现本地和远地的网络连接,为远程维护打下了坚实的硬件基础。
3.这次研制中也发现了一些不足,PLC的高度很宽度都比较大,希望能小型化,PLC的端子COM端位置设计的不够合理,以及断电保持的锂电池固定不够紧,有可能在震动的过程中松脱等。
4.软件编程方面也有一些不足,比如MODBUS通信完成标志位只有一个,没办法直接反应每一条MODBUS指令执行情况,对于使用欧系PLC的编程者来说或许会增加编程难度,如果能吸取欧系PLC的一些指令块和界面元素就更加完美了。
5.注释不够详细,界面不够友好,希望以后能做到将光标落到指令上,就自动弹出指令的说明,这样更容上手,更快捷。
本项目是试验性项目,已经完成各项参数的测试,圆满完成测试任务,希望设计者能多多改善,希望国产PLC越做大,越做越精。
最后修改:2015/5/6 14:47:58