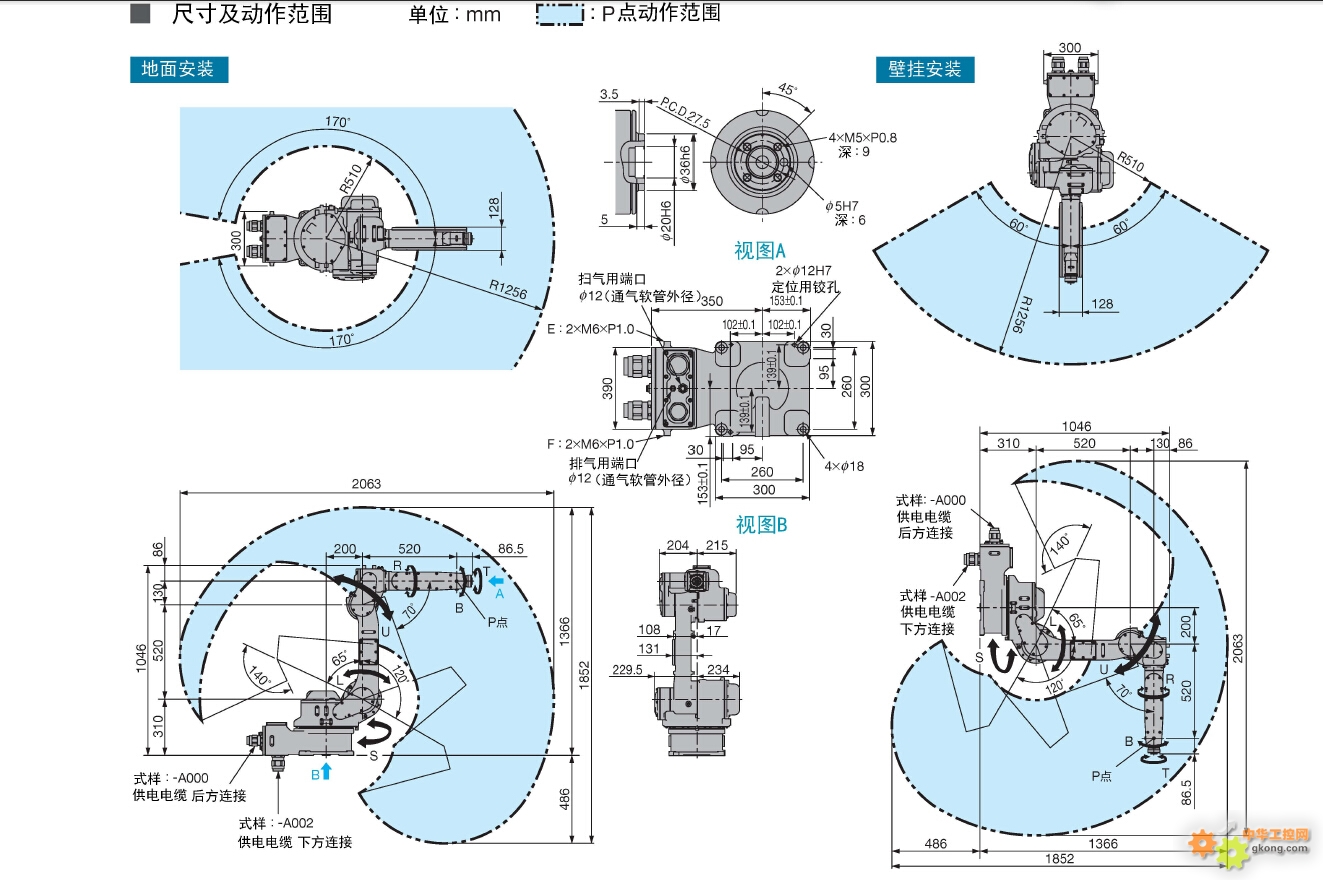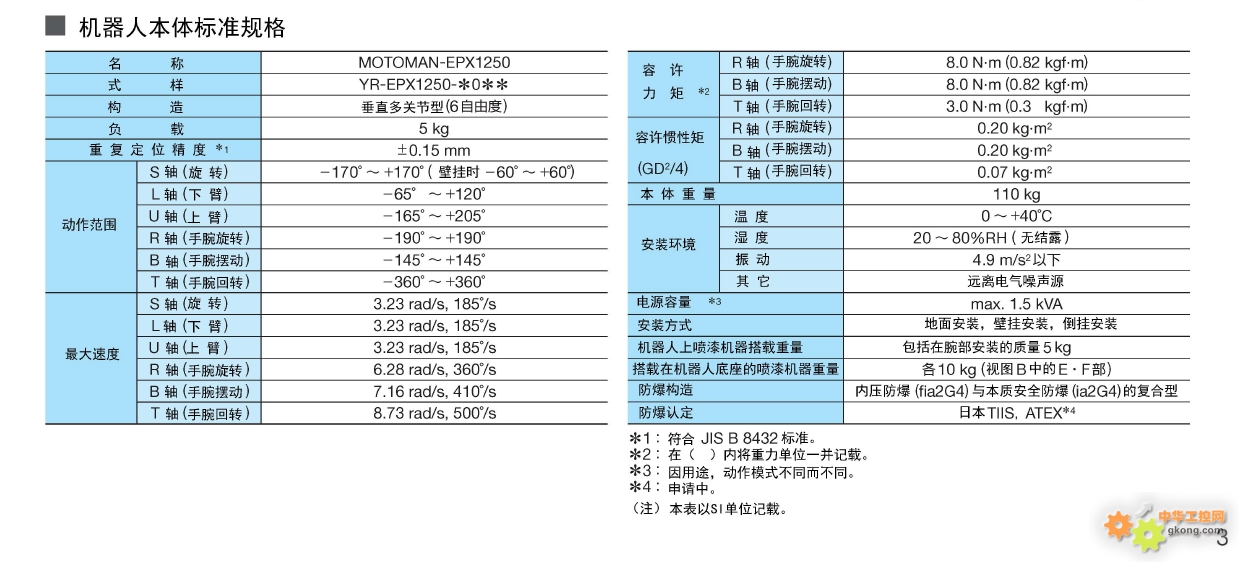
正在做工业机器人的毕业设计,准备绘制机器人的工作空间,但是还没得出运动学方程,刚刚接触机器人这个领域,D-H方法差不多能搞懂,但这个D-H坐标系建立实在是被弄晕了啊。。。翻了三本书和几篇文献,感觉每一种方法都不一样而且作者都不把建立的依据写清楚啊啊啊啊啊本来就不怎么懂这个领域要奔溃了,求大神帮我看看吧,感激不尽啊!!!!![附件 MR【@ASSLB)VK6VR}H`【W0_K.jpg]()
15-04-16 15:49