一、 应用简介
在铜棒生产时需要添加润滑剂,使铜坯表面光滑、无粘接、无划痕。而添加润滑剂需要”少加、勤加、均匀加”,这对工人的身体素质和经验要求很高,为了把工人从繁重而重复的劳动中解放出来,提高自动化水平,我们开发了一套自动喂料系统。本系统通过PLC进行中央控制按设定的算法自动喂料。欧辰的IDEABOX_mini为中央控制器,IDEABOX_mini既可以在软件内很方便的做逻辑控制控制,又可以做一些简单运动控制,而且用ST语言的方式可做一些简单算法
二、 应用说明
本系统加料管可以均匀出料,出料速度可由电机控制。而加料管又可以在加料口的左右方向移动,进料口带加料口一起左右移动,由另一电机控制。2台电机的运行速度可通过IDEABOX_mini通过运动控制器功能控制,其中电机的转速根据生产速度和设定关系得出,并通过程序功能块发送给电机的驱动器进行控制。


1. 系统组成

? IDEABOX_mini用Can通讯控制2台驱动器
? 操作箱与IDEABOX_mini进行信号交互。
2. IO接口表
地址 信号用途
IX0.0 正向接近开关信号
IX0.1 负向接近开关信号
IX0.2 启动
IX0.3 停止
IX0.4 急停
QX0.0 正向接近开关
QX0.1 负向接近开关
QX0.2 电机1运行
QX0.3 电机2运行
QX0.4 驱动器1状态
QX0.5 驱动器2状态
QX0.6 系统状态
3. 关键程序
? PLC配置

IO选用CPU自带的IO通道。
? IO配置

? 逻辑控制部分
主要是把外部DI经过逻辑判断,然后得到处理后的结果,送给其它模块调用,所有DI必须在此模块转换。
? 启动信号进来维持200ms以上,无停止和急停信号,2个驱动器正常,则发出run指令。
? 停止信号进来200ms以上,无启动和急停信号,系统在运行,则复位run指令
? 急停信号进来1000ms,无启动或停止信号,系统在运行状态,则发出急停指令
? 正向接近开关信号维持100ms,无负向接近开关信号,系统在运行,则置位负向命令,复位正向命令。
? 负向接近开关信号维持100ms,无正向接近开关信号,系统在运行,则置位正向命令,复位负向命令。

? 从CAN第11从站PDO数据得到状态字的第7位送给电机1运行状态变量
? 从CAN第12从站PDO数据得到状态字的第5位送给驱动器2状态变量
? 从CAN第12从站PDO数据得到状态字的第7位送给电机2运行状态变量

调用系统功能块,MC_MoveVelocity,用来控制电机转速,转速参数可正可负,非常方便的调节正反转和转动速度。


? 从第11号从站读取的速度模拟量,进行单位转换。
? 对速度进行一个滤波,防止模拟量频繁波动
? 1号电机根据参数和速度得出转速,此转速一直是正方向。
? 2号电机根据参数和速度得出转速,正或者负方向,根据接近开关状态决定。
? 为了防止电机转速突变,影响实际机械设备,所以做了一个平滑算法,算法如下。
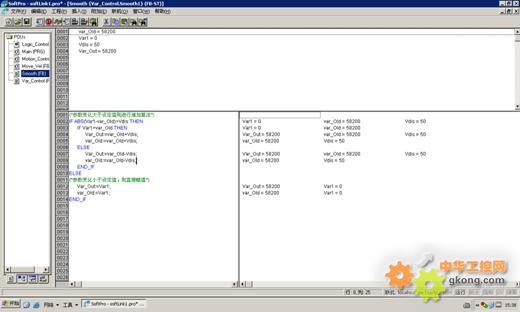
? 判断当前转速与前一次转速比较,如果大于参数值,则每次变化参数值,如果小于参数值则直接变化。
? 此方法有效的避免了速度突变对机械影响。
? 主程序

? 判断当前转速与前一次转速比较,如果大于参数值,则每次变化参数值,如果小于参数值则直接变化。
? 此方法有效的避免了速度突变对机械影响。
? 主程序

? CAN通讯全局变量区

四、 应用体会
1. 使用过程体会
优点
? 拿到手第一感觉就是IDEABOX_mini小,一个小小的包装箱竟然包含CPU和远程IO,非常紧凑。
? CPU模块自带24路DI,24路DO,且全部带LED指示灯,方便观察和调试。
? CPU模块自带CAN主站,可带CAN从站的驱动器或远程IO。
? CPU模块带以太网接口可与PC机方便连接,快速编程下载调试。
? CPU模块带USB接口,可作为编程口使用,但我未使用。
? 编程采用CodeSysV2.3,通用性高容易上手,方便仿真、调试和下载。
? 编程软件可使用ST,LD,CFC,IL,FBD,SFC,非常方便。在一个程序块内可以添加”动作”,而”动作”的语言又不必和程序块一致,适合大的功能根据需要使用不同的语言。
? 硬件组态内的地址可以定义变量映射,程序中直接调用。
缺点
? 在编程过程中如果添加了变量,会提示定义变量类型,这时候如果选用全局变量,那变量会默认定义在”CANopen implicit Variables”内,而不是”Global_Variables”内。造成编译时系统不识别变量造成报错,需要手动把全局变量从”CANopen implicit Variables”剪切粘贴到”Global_Variables”。如下面2个图所示。


2. 与其它品牌比较
与倍福CX1020比较,CPU集成了CAN,24DI,24DO,对于小型应用来说不需要再配置IO模块,CAN模块。我的感觉CX1020更灵活但是价格肯定高,而IDEABOX_mini更简捷,对小型系统非常适合。如果在小型且运动功能简单的场合,可以毫不犹豫的选用IDEABOX_mini。
最后修改:2013/12/18 10:33:31
