登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:伺服回原点精度保证
点击:1219 回复:7
楼主
编辑
引用
管理
zhou-jinzhang
在伺服回原点过程中,以前一般采取如下办法:
首先给一个速度指令,碰到原点传感器后以一更低的速度来找第一个Z相脉冲信号,这样在实际应用过程中没什么问题。
但有点不明白。
例:伺服驱动丝杆,丝杆导程10MM
从碰到原点传感器到第一个Z相脉冲信号之间理论上来说最大会有一个导程(10mm)的误差,但在实际应用过程中没有如此大的误差,
其中的原因有哪位大侠可以指点一下
最后修改:
2011/9/7 16:42:58
11-09-07 16:16
1楼
编辑
引用
管理
lj19820422
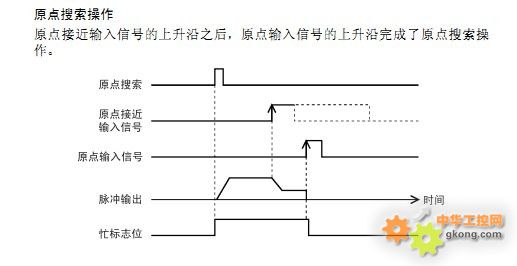
如时序图所示,当给一个回原点信号后,发出脉冲电机像原点方向移动,当碰到原点接近传感器后,速度降低继续回原点运动。当碰到原点信号后。停止脉冲~!
11-09-07 16:55
2楼
编辑
引用
管理
zhou-jinzhang
最后修改:
2011/9/8 9:43:01
11-09-07 21:29
3楼
编辑
引用
管理
匿名用户
该用户被锁定!
11-09-08 12:02
4楼
编辑
引用
管理
wanwan8778
楼主说的导程(10mm)是不是伺服电机连接后的丝杠吧,原则上来说是没有这个10mm的
11-10-22 22:45
5楼
编辑
引用
管理
wanwan8778
引用
lj19820422
在 2011/9/7 16:55:19 发言
【内容省略】
补充一下,2楼正解,呵呵
11-10-22 22:48
6楼
编辑
引用
管理
fuyongcheng
是伺服电机旋转一圈发出的一个Z相脉冲跟导程没关系
11-10-29 19:57
7楼
编辑
引用
管理
gangshiyuan
不错,我也正想知道数控机床回零原理。
11-10-29 19:57
工控新闻
海尔系斥资超12亿元巩固控制权 新时达背靠“大树”谋扭亏
创维光伏发布“羲寰”生态平台 构建智慧能源新生态
兆威机电拟1亿美元投建泰国基地 五年研发费6亿股价年内涨61.54%
论道工业智能体:落地关键与挑战?
国内首个电气行业AI大模型通过国家网信办备案
六维力传感器成机器人关键部件 多家上市公司掀起“军备竞赛”
智元机器人全系产品正式开售!领衔人机共生新时代
零碳园区建设与投资研讨会在合肥召开
更多新闻资讯