
各位大虾,请教问题一个。
我们公司正在开发交流伺服系统。目前使用的是松下交流伺服电机即驱动器,固高控制板卡。我经过一段时间的参数调节,基本上知道了如何调驱动器和控制板的参数。但目前的问题是,伺服电机在跑到
指定位置之后,总是不停的震荡,震荡幅度+/-1或2个脉冲左右。有时是在稳定后,突然来几个震荡。而我们公司的要求是,即使1个脉冲的震荡也不能有!要使电机定位后时刻锁定在同一个位置。
说实在话,这1-2个脉冲的震荡其实也就是0.4-0.8um的大小,但我们还是要去掉。真是愁死我了。知道办法的高手说一下啊。

哈哈,楼主着急了。我管这个现象叫“帕金森”,就象半身不遂的病人的手一样。在定位控制中,如果弄不好,特容易出现此问题。这种现象,原因很多,其中现场的噪声(电磁干扰)是一个很主要的原因。没有什么“特效药”,只能是现场观察、发现、解决。
看来我们很有“共同语言”呀。
看来我们很有“共同语言”呀。
04-11-13 19:45
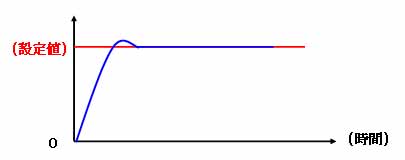
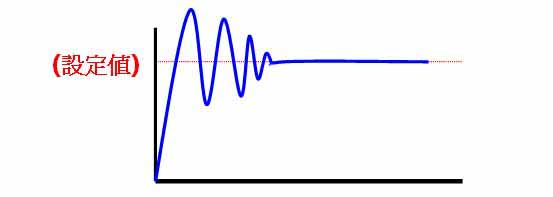
如果发生以下这两种振荡,那就是你的伺服驱动器参数没有调好:
![附件]()
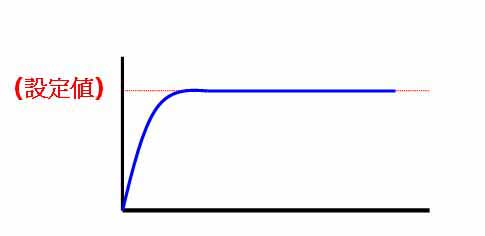
![附件]() 调好了的曲线应该是这样的:
调好了的曲线应该是这样的:
![附件]() 在停止时突然振荡,那就是干扰问题了,试试把控制线加屏蔽看看怎么样
在停止时突然振荡,那就是干扰问题了,试试把控制线加屏蔽看看怎么样
04-11-13 21:34
哈哈?godspeed厉害呀,这三附图是你画的自己的“杰作”?还是抄书抄来的?能说说这三附图中的每图特点嘛?如果再描述出调节参数(pid)与图中实际值曲线的变化趋势(定性分析),那可就好了。伺服控制中的定位控制,是不是一般不允许超调呀?也就是应该符合你的第三幅图的曲线要求。
04-11-13 21:57

大虾,能否说的具体一点?pid的本意不就是对误差的控制吗?如果没有误差,何来控制?
如果可以的话,如何具体调那些参数?
利用控制板控制的过程中,能够使电机忽略1-2个脉冲,从而使电机缩紧在某一位置吗?
我希望宁可有1-2个脉冲的稳态误差,也不希望有震动。
如果可以的话,如何具体调那些参数?
利用控制板控制的过程中,能够使电机忽略1-2个脉冲,从而使电机缩紧在某一位置吗?
我希望宁可有1-2个脉冲的稳态误差,也不希望有震动。
04-11-14 09:44
godspeed,你好。
你发的图很好。但是感觉你的图是在宏观上的。如果具体到1-2个脉冲,你的图好像看不出来。
我的要求是系统定位后一个脉冲也不能抖动。我在调试时发现有时同样的一组参数在同一段滚珠丝杠上跑同样的一段距离,输出的波形图都不一致。有时根本不震荡;有时稳定30ms后偶尔抖动一两次;有时不停的抖动;
我只想要一个锁住当前位置的做法。一个想法是在某一段时间内不让电机伺服,让它忽略1-2个脉冲的误差!20ms之后再让它伺服。开始运动。
你发的图很好。但是感觉你的图是在宏观上的。如果具体到1-2个脉冲,你的图好像看不出来。
我的要求是系统定位后一个脉冲也不能抖动。我在调试时发现有时同样的一组参数在同一段滚珠丝杠上跑同样的一段距离,输出的波形图都不一致。有时根本不震荡;有时稳定30ms后偶尔抖动一两次;有时不停的抖动;
我只想要一个锁住当前位置的做法。一个想法是在某一段时间内不让电机伺服,让它忽略1-2个脉冲的误差!20ms之后再让它伺服。开始运动。
04-11-14 09:56
引用 kdrjl 在 2004-11-13 21:57:00 发言【内容省略】
copy的啦,自己懒得画!我对松下的不熟悉,不敢乱发表。第一幅图的现象应该是P太高造成的吧,第二幅图的现象应该是I太高造成的吧!最理想就是象第三幅图那样啦!不过还是要看什么场合,有些时候为了达到快速效应,超调一点不设备造成影响的话,也无妨吧,只要系统可以在你可以承受的时间内停止下来就好了!也就是说第一幅图的现象在某些场合也是可以接受的。个人理解是这样,有不对的地方请大家指正!





04-11-14 20:03
引用 szllc 在 2004-11-14 9:56:00 发言【内容省略】
不明白你说的1-2个脉冲是什么回事,这1-2个脉冲是干扰吗?如果是干扰的话,你不可锁定伺服,让它忽略这1-2个脉冲吗?伺服定位后,它自己就会锁定在某个位置,除非你的负载波动得厉害,这时伺服马达就会发生抖动,不然它自己不会抖动吧,没有碰到你说的情况!
如果是由于负载的情况,加大系统钢性试试!
04-11-14 20:14