登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:【正运动技术】6099报错6090031h问题处理
点击:22 回复:0
楼主
编辑
引用
管理
运动控制小正
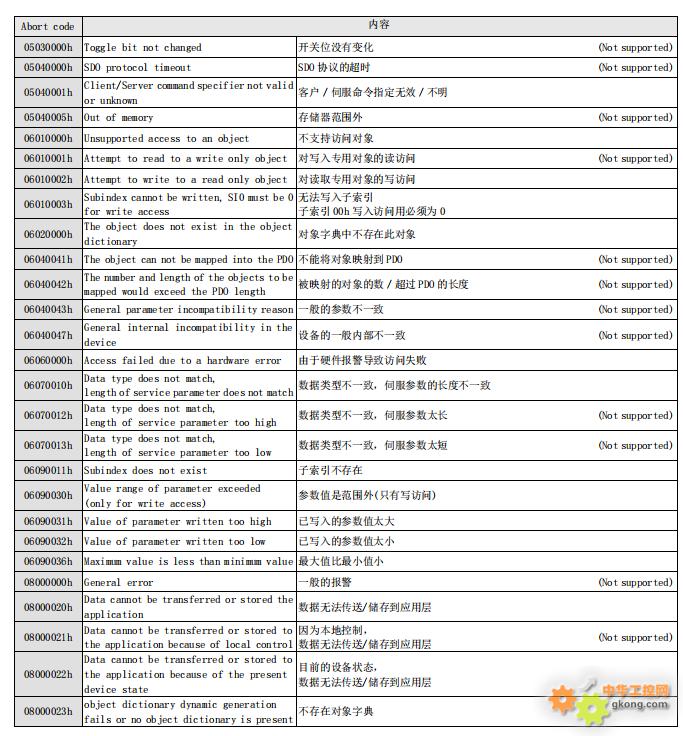
6099报错6090031h问题
可能原因:
报6090031是参数值太高,问题在于驱动器那边的单位是圈,而控制器给的速度是乘上脉冲当量的,这导致控制器这边传输过去的速度值报6090031h。6099是驱动器回零速度。
解决方案:
回零前将脉冲当量修改为1在启动驱动器回零就能解决了。
排查方法:
402协议错误码:写入数据异常。
25-06-25 16:25
工控新闻
华北工控BIS-6960P-A10TW:适用于整车制造焊接线的机器人集群化控制
一文get六月工控自动化大事
翼菲智能冲刺港交所 为国内领先的综合性工业机器人企业
边缘AI技术爆发式增长 | elexcon2025深圳国际电子展暨嵌入式展90%展位已售罄
AMTS 2025同期论坛预告 | 图尔克现场分布解决方案在汽车行业的应用
西门子 EDA 推新解决方案,助力简化复杂 3D IC 的设计与分析流程
“AI+”开启工业设计“造梦工厂”
天硕(TOPSSD)工业级固态硬盘PLP如何守护75ms关键数据
更多新闻资讯