登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:【正运动技术】机械手问题(六)
点击:49 回复:0
楼主
编辑
引用
管理
运动控制小正
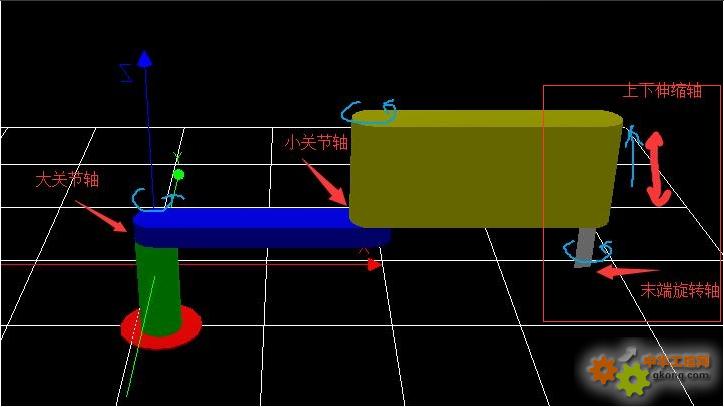
问题描述:Scara机械手逆解状态下虚拟R轴运动时,实际Z轴高度会变化
排查原因:
1.电机的转向和《正运动机械手指令说明》相反;
2.Zdis结构参数填写错误。
解决方法:
1.电机J1、J2、J4在俯视角度下正向运动时,保证是逆时针旋转,电机J3正向运动时应向上抬升。
2.检查结构参数,具有RZ耦合特征时(复合轴),耦合比Zdis和螺距需要设为一致;不具有RZ耦合特征时,耦合比Zdis需要设为0。
最后修改:
2025/6/12 15:07:05
25-06-12 15:05
工控新闻
盐湖提锂“淘金记”:维谛技术(Vertiv)让“白色宝藏”变身新能源“血液”
「魏德米勒 175 周年」 同心同行,共赴橙色之旅
PTC 推出 Arena 供应链智能,助力制造商和产品公司缓解供应链风险
Vishay CHA系列通过AEC-Q200认证的薄膜片式电阻现推出0402外壳尺寸
一文get六月工控自动化大事
中国6月财新制造业PMI升至50.4,重回扩张区间
天硕工业级M.2 NVMe SSD固态硬盘LDPC纠错引擎升级
ABB低压传动50周年有奖征文活动
更多新闻资讯