登录
首页
运动控制
运动控制
回帖
发帖
正文
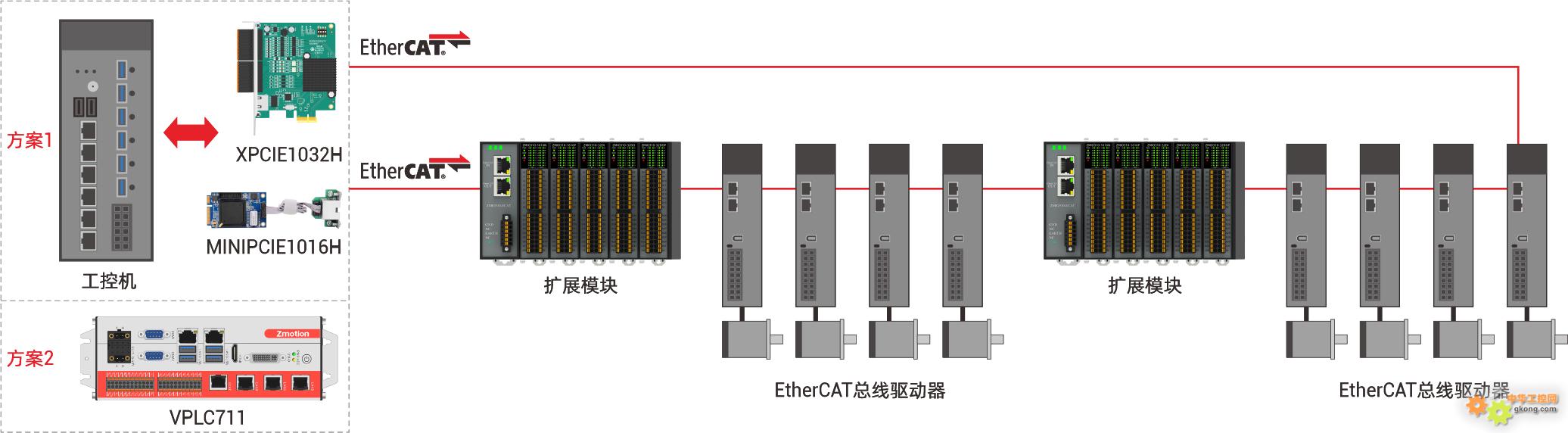
主题:【正运动技术】环形冗余架构实现原理
点击:44 回复:0
楼主
编辑
引用
管理
运动控制小正
通过将末端从站的EtherCAT OUT端口回连至主站,构建物理环形通讯链路。当线性链路中任意从站发生故障时,系统将快速自动切换至另一路径,确保非故障从站持续保持正常EtherCAT通信,可显著提升系统可靠性与运行稳定性。
针对连续生产场景对设备24/7不间断运行的要求,冗余机制实现EtherCAT通讯的更可靠和更稳定,可有效杜绝非计划停产导致的产能损失。
25-06-11 15:24
工控新闻
西门子从亚马逊招募人工智能专家
和利时助力渝厦高铁渝黔段开通运营!
AMTS 2025同期论坛预告 | 图尔克现场分布解决方案在汽车行业的应用
2025RoBoLeague机器人足球联赛总决赛在北京亦庄开赛
细分PLC行业的未来发展趋势:自主可控、网络化、智能化、信息
工信部最新定调!法大大发布首部《制造行业合同数智化升级白皮书》
边缘AI技术爆发式增长 | elexcon2025深圳国际电子展暨嵌入式展90%展位已售罄
华北工控EMB-3513边缘AI主板:支持机器人视觉传感器摄像头系统集成应用
更多新闻资讯