登录
首页
运动控制
运动控制
回帖
发帖
正文
主题:【正运动技术】回零模式详解(五)
点击:73 回复:0
楼主
编辑
引用
管理
运动控制小正
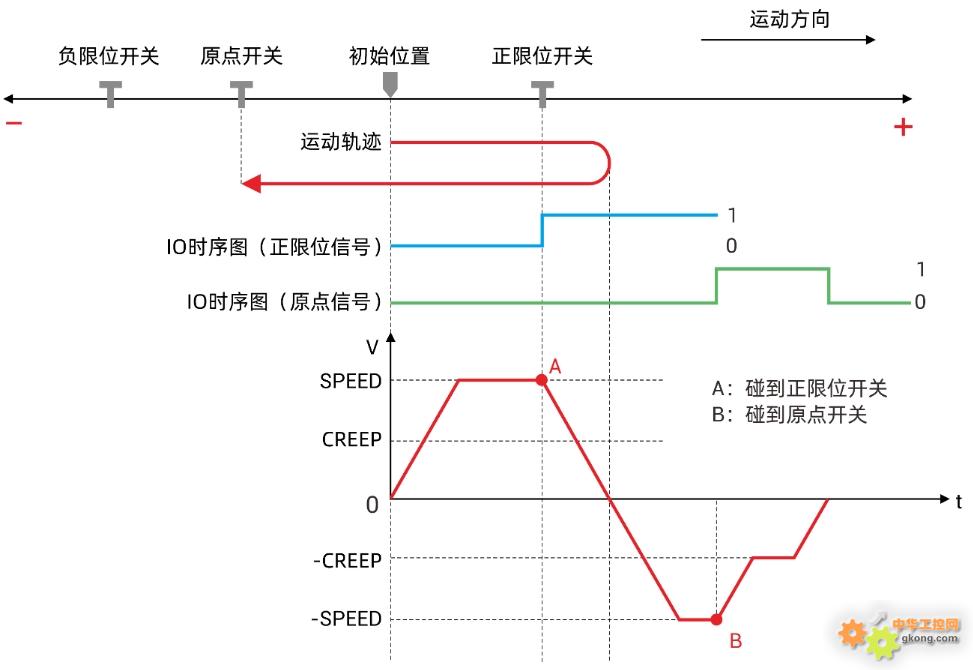
回零模式13:
mode=13
(注:mode为指令中的参数,具体指令介绍可看往期主题帖)
轴先以SPEED正向运行,若碰到限位开关,不会报警停止,以SPEED反向运动,碰到原点开关后减速为CREEP直至离开原点开关立即停止,回零成功,位置清零。若先碰到原点信号,则与模式3相同。
更多详情内容请点击→“
正运动技术官网
”查看。
25-04-15 11:45
工控新闻
细分PLC行业的未来发展趋势:自主可控、网络化、智能化、信息
台达参与第十六届“绿色发展 低碳生活”主题对话
天硕工业级M.2 NVMe SSD固态硬盘LDPC纠错引擎升级
产业升级需合规助力:高价值嵌入式产品出海的必由之路
Vishay CHA系列通过AEC-Q200认证的薄膜片式电阻现推出0402外壳尺寸
西门子从亚马逊招募人工智能专家
西门子 EDA 推新解决方案,助力简化复杂 3D IC 的设计与分析流程
华北工控BIS-6950P-B10:智能分拣系统不可或缺的“工业大脑”
更多新闻资讯