
利用 PLC 实现点动控制步进电机的正反转,当我们输入 X0 信号的
时候,控制步进电机正向转动,断开 X0 信号时,步进电机紧急停止;输
入 X1 信号的时候,控制步进电机反向转动,断开 X1 信号时,步进电机
紧急停止。
【程序编辑】
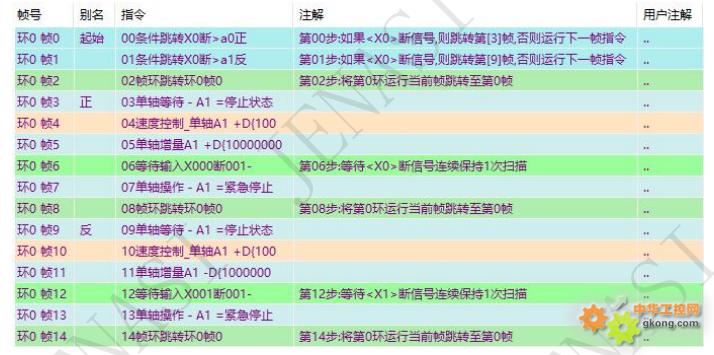
1、在环 0 中编辑程序
①在帧 0-帧 2 中添加控制正反转的条件跳转指令:输入信号条件跳
转 X0(正向条件跳转)和 X1(反向条件跳转)均为通状态,后在添加
一条帧环跳转 00 环指令循环扫描。
②在帧 3-帧 6 中添加控制步进电机正向动作的指令:添加单轴等待,
检测步进电机为停止状态时,进行正向动作,速度比为 100,位移比值
为 1000000。添加等待输入指令,X0 为断状态,再添加单轴操作指令,
操作动作为紧急停止。添加帧环跳转指令 0 环等待启动信号。
③在帧 9-帧 11 中添加控制步进电机反向动作的指令:添加单轴等
待,检测步进电机为停止状态时,进行反向动作,速度比为 100,位移
比值为 1000000。添加等待输入指令,X1 为断状态,再添加单轴操作
指令,操作动作为紧急停止。添加帧环跳转指令 0 环等待启动信号。
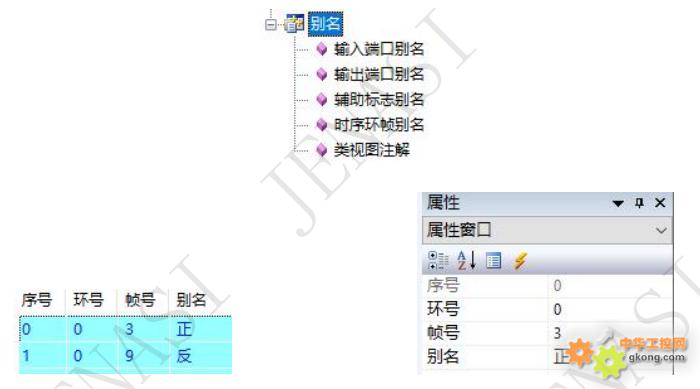
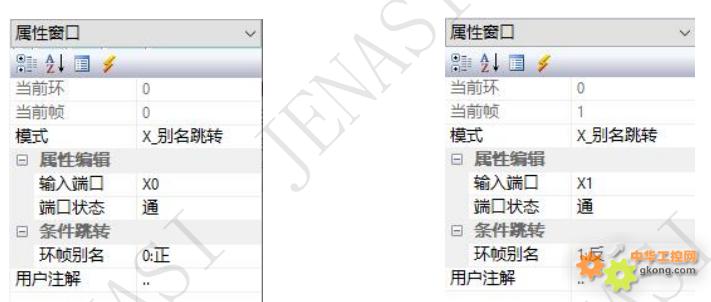
时序环帧别名,帧 3 别名为正向,帧 9 别名为反向。
为通信号时,根据别名“正向”跳转至帧 3 指令,进行步进电机正向动作;
X1 为别名跳转模式,当 X1 为通信号时,根据别名“反向”跳转至帧 9 指
令,进行步进电机反向动作。
行正向动作,断开 X0 信号时,进行紧急停止动作;当有条件 X1 信号输
入时,则步进电机进行反向动作,断开 X1 信号时,进行紧急停止动作. 由于控制内置辅助标志均为断状态,没有信号时,步进电机不进行任何
动作。