
在Somachine 控制平台设计一个复杂的机器控制系统,最优的结构就是使用CANopen总线,把诸多的控制元素诸如变频器,伺服驱动器,传感器,开关按钮等通过一条电缆连接起来,共享各个控制单元的状态信息,控制指令等,如图所示。大量使用CANopen总线不仅由于其通讯速度大大高于Modbus, 更是由于其良好的抗干扰能力和简单的物理安装结构及组态方式。这章我们就来讨论CANopen总线的特性及应用。

CANopen是一种架构在控制局域网路(Control Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。
CANopen 实际作了OSI模型中的网络层以上(包括网络层)的协定。CANopen 标准包括寻址方案、数个小的通讯子协定及由设备子协定所定义的应用层。 CANopen 支持网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的分段传送及其组合。一般而言资料链结层及实体层会用CAN来实际操作。
基本的 CANopen 设备及通讯的协定定义在 CAN in Automation (CiA) 标准 301中。针对个别设备的子协定以 CiA 301 为基础再进行扩充。如针对 I/O 模组的 CiA401 及针对运动控制的 CiA402。其通讯架构如图所示。
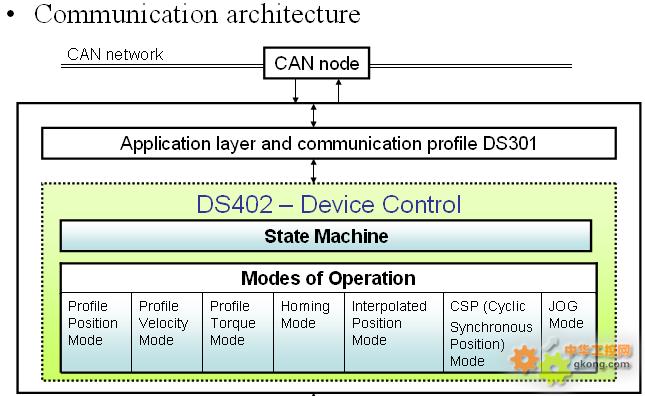

设备通讯
通讯单元处理和网络上其他模组通讯所需要的通讯协定。 设备的启动及重置由状态机 (state Machine)控制。状态机需包括以下的几个状态:初始化Initialization, 预运行Pre-operational, 运行Operational 及 停止Stopped。当接收到网络管理 (NMT) 通讯对象,状态机会转换到对应的状态。 对象字典 (Object Dictionary) 是一个有 16 位元索引 (Index) 的变量阵列。每个变量可以(但非必须)有 8 位元的子索引 (Subindex)。变量可用来调整设备的组态,也可以对应设备量值的数据或设备的输出。 当状态机设定为 operational 之后,设备的应用 (application) 部分就会实现设备预期的功能。此部份可以由对象字典中的变量调整其设定,而数据由通讯层传输或接收。
对象字典
CANopen 设备都需要具备对象字典,用来设定设备组态及进行非即时的通讯。对象字典的入口定义如下:
索引 (Index):对象 16 位元的位址。 对象名称 (Object name):一个代表对象的符号类型,可以是阵列、纪录或只是一个变量。 名称 (Name):描述此入口的字串。 形态 (Type):变量的数据形态。 属性 (Attribute):提供此 入口 是否可读/可写的数据,有下列四种:可读/写、只读、只写、只读常数。 必须 (Mandatory)/可选 (Optional)字段定义属于特定设备规范下的设备,是否必须实现某些对象。 在 CANopen 标准中定义了对象字典中的基本资料型态,包括逻辑值、整数及浮点数。也定义了复合对象:如阵列、记录及字串。复合对象用一个 8 位元的数值作为其子索引(subindex)。记录或阵列中子索引 0 的位置记录此数据结构的元素个数,资料型态为 UNSIGNED8。
例如在 CiA301 标准中,设备通讯的参数放在索引范围 0x1000 - 0x1FFF (通讯行规区)。此区域的前几项如下表:

通讯对象
CANopen 的物理层 CANbus 每次传送的资料量不大,其中包括 11 位元的 ID、远端传输请求(RTR)位元及大小不超过8位元的数据。CANopen 将 CANbus 11 位元的 ID 分为 4 位元的功能码及 7 位元的 CANopen 节点 ID。7 位元的 ID 共有 128 种不同的组合,其中 ID 0 不使用,因此一个 CANopen 网络上最多允许 127 台设备。CANbus 在 CAN 2.0 B 规格中允许 29 位元的 ID,因此若配合 CAN 2.0 B 使用,CANopen 网络上可以超过127 台设备,不过在实际运用中,大多数的 CANopen 网络上设备数量均低于此数值。
CANopen 将 CANbus 的 11 位元 ID 称为通讯对象 ID (COB-ID)。当传输数据出现碰撞时,CANbus 的仲裁机制会使 COB-ID 最小的讯息继续传送,不用等待或重传。COB-ID 的前 4 个位元是 CANopen 的功能码,因此数值小的功能码表示对应的功能重要,允许的延迟时间较短。
以下表是一个标准的 CANopen 帧:

通讯模型
CANopen 设备间的通讯可分为以下三种通讯模型。
在 master/slave 模型中,一个 CANopen 设备为 主站master,负责传送或接收其他设备从站(称为 slave)的数据。NMT 协定就使用了 master/slave 模型。 客服(client/server)模型定义在 SDO 协定中,SDO 客户 将对象字典的索引及子索引传送给 SDO 服务员,因此会产生一个或数个需求数据(对象字典中,索引及子索引对应的内容)的 SDO 封包。 生产者/消费者(producer/consumer)模型 用在 Heartbeat and Node Guarding 协定。由一个生产者送出数据给消费者,同一个生产者的数据可能给一个以上的消费者。又可分为二种: 推送方式push-model:生产者会自动送出数据给消费者。 拉进方式pull-model:消费者需送出请求讯息,生产者才会送出数据。
NMT协定
NMT 协定NMT(网络管理, Network management)协定会定义(设备内部)状态机的状态变更命令(如启动设备或停止设备)、侦测远端设备 bootup及故障情形。
NMT master 使用的模组控制协定可变更设备的状态。其 COB-ID 为 0,其功能码及节点 ID 均为 0,因此网络上的所有节点均会处理这个讯息。在此讯息的数据部份会有此讯息实际针对节点的ID,此 ID 也可为 0,表示所有节点都要变更为指定的状态。
使用 CIA405.NMT 功能块可以从控制器应用程序控制 CANopen 设备的 NMT 状态。例如,我们用此功能块复位CAN总线或总线上的某个节点。
功能块通过执行对 CANopen 目标设备的 NMT 服务请求,来执行请求的 NMT 状态转换。
CIA405.TRANSITION_STATE ENUM
NMT 状态机描述主要操作中的 NMT 从站的初始化和状态。
下图显示的是 NMT 状态、关联的可用通讯对象(PDO、SDO、SYNC、EMCY 和 NMT)和 5 种状态转换(A 到 E)。


其格式为:
COBID + DATA(status of node) CANopen 设备需要在 bootup 时自动从 Initializing 状态切换至 Pre-operational 状态,设备会在切换完成后送出一个心跳讯息,这就是心跳协定。
有一种 pull model 的 NMT 协定,称作节点监控(Node guarding)协定,也可以作从机的监控。
服务数据对象 (SDO) 协定
服务数据对象(SDO)可用来存取远端节点的对象字典,读取或设定其中的数据。提供对象字典的节点称为SDO server,存取对象字典的节点称为SDO client。SDO 通讯一定由SDO client 开始,并提供初始化相关的参数。
在CANopen的术语中,上传是指由 SDO server 中读取数据,而下载是指设定 SDO server 的数据。
过程数据对象 (PDO) 协定
过程数据对象 (PDO) 协定可用来在许多节点之间交换即时的数据。可透过一个 PDO ,传送最多 8 字节(64位元)数据给一设备,或由一设备接收最多 8 字节(64位元)的数据。一个 PDO 可以由对象字典中几个不同索引的资料组成,规划方式则是透过对象字典中对应 PDO 配置 及 PDO 参数的索引。
PDO 分为两种:传送用的 TPDO 及接收用的 RPDO。一个节点的 TPDO 是将资料由此节点传输到其他节点,而 RPDO 则是接收由其他节点传输的资料。一个节点分别有 4 个 TPDO 及 4 个 RPDO 。
PDO 可以用同步或异步的方式传送:同步的 PDO 是由 同步SYNC 讯息触发,而异步的 PDO 是由节点内部的条件或其他外部条件触发。例如若一个节点规划为允许接受其他节点产生的 TPDO 请求,则可以由其他节点送出一个没有数据但有设定 RTR 位元的 TPDO(TPDO 请求),使该节点送出需求的数据。
借由 RPDO 也可以使两种设备同时启动。
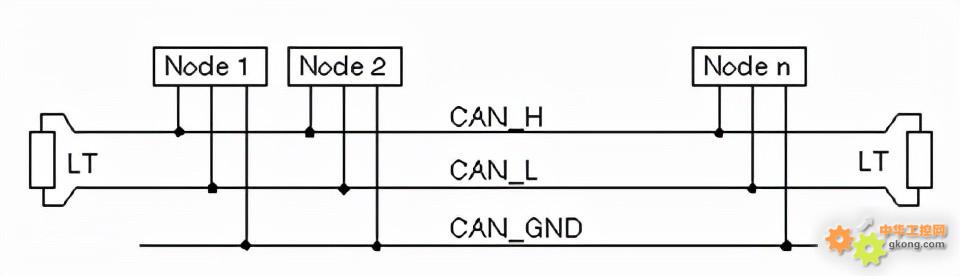
除了定义对象字典,CANopen协议还定义了网络拓扑结构,如图所示。即连接各个设备站点的电缆是带屏蔽的双绞线,传输线的终端电阻为120欧姆。在整个网络中包括主站在内的站点数,最多不能超过127个。电缆的信号为CAN_H,CAN_L和CAN_GND。在同一网络内,各个站点的通讯速率要求配置一样。通讯速率根据传输距离的大小而有不同。请参见表




驱动器上的CANopen总线RJ45端口定义如图:
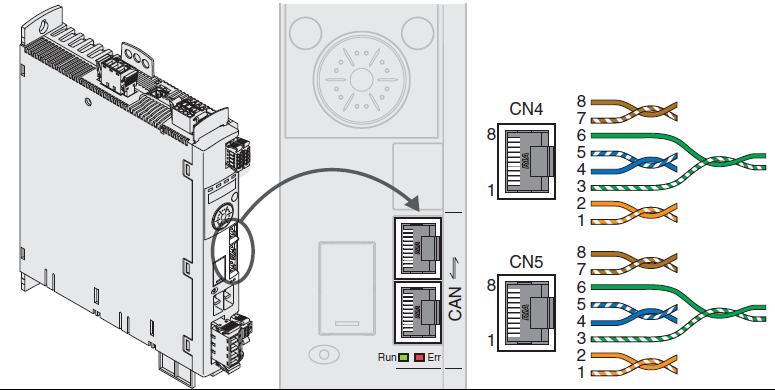
当波特率为 1Mbit/s 时,传输线就限制为 .3m。
RJ45接头定义如下:

最后修改:2022/5/12 10:14:06




