
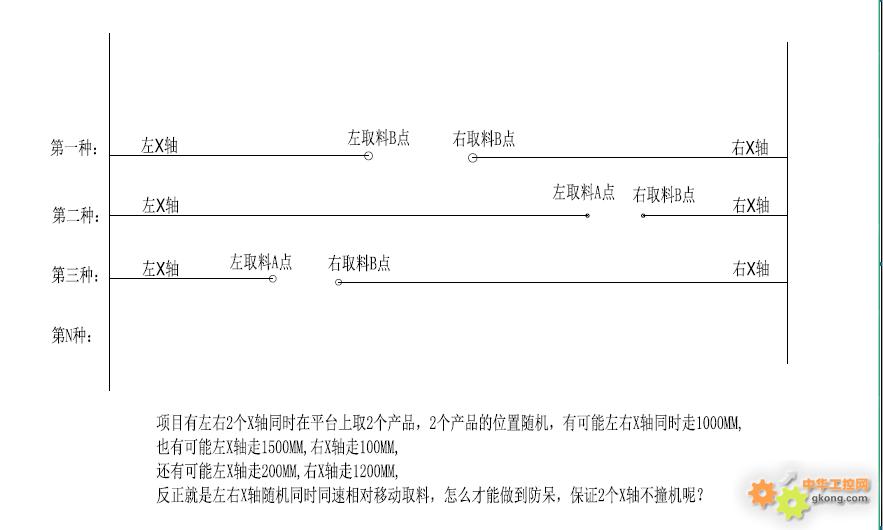
项目有左右2个X轴同时在平台上取2个产品,2个产品的位置随机,有可能左右X轴同时走1000MM,
也有可能左X轴走1500MM,右X轴走100MM,
还有可能左X轴走200MM,右X轴走1200MM,
反正就是左右X轴随机同时同速相对移动取料,怎么才能做到防呆,保证2个X轴不撞机呢?

左右两个X轴取料点,取料范围的职责划分是怎么划分的?是有料大家抢着去取?就像计件工资一样多劳多得(自动化设备没有这个说法吧) ?
?
划分区域取料,以中间分割线为准则,各管各的区域,互不干涉不好么?
?划分区域取料,以中间分割线为准则,各管各的区域,互不干涉不好么?
最后修改:2021/11/27 11:53:55
21-11-27 11:46
还有,既然物料摆放的位置不固定,随机摆放,两个X轴是怎么获取物料坐标,并完成精确取料动作的呢?
不上工业视觉相机传感器是搞不定的吧?既然已经使用视觉相机进行坐标定位,那肯定在软件坐标系统里面,已经设计有最优取料路径的设计,并防止撞机了对不?你只是想在外部硬件上加一层防呆设计么?
这个确实不好搞,就像加工中心一样,程序虽说已经有防撞刀设计,但是遇到二百五的加工工件编程人员,一样能人为的去撞刀。所以建议你在物料摆放好以后,中间添加一级物料导流槽,进行区域隔离摆放的装置。
不上工业视觉相机传感器是搞不定的吧?既然已经使用视觉相机进行坐标定位,那肯定在软件坐标系统里面,已经设计有最优取料路径的设计,并防止撞机了对不?你只是想在外部硬件上加一层防呆设计么?
这个确实不好搞,就像加工中心一样,程序虽说已经有防撞刀设计,但是遇到二百五的加工工件编程人员,一样能人为的去撞刀。所以建议你在物料摆放好以后,中间添加一级物料导流槽,进行区域隔离摆放的装置。
最后修改:2021/11/27 12:07:29
21-11-27 12:00
